إعداد مقاوم الضوء المغناطيسي المرن
تم شراء جميع المواد الكيميائية من Sigma-Aldrich ما لم ينص على خلاف ذلك. يتكون مقاوم الضوء المرن من يوريتان أكريليت أوليجومر 70 % بالوزن، بولي (إيثيلين جلايكول) دياكريلات 28.40 % بالوزن كمادة متشابكة، 1-(4-(2-(ديميثيلامينو)إيثوكسي)فينيل)-2-فينيل-1-بوتانون 1.5 wt % كمبدئ ضوئي، ومركب من 2,2,6,6-رباعي ميثيل بيبيريدين-1-أوكسيل 0.05 بالوزن% وميثاكريلات الميثيل 0.05 بالوزن% كمخمد. تمت نفخ الخليط بالنيتروجين لمدة 30 دقيقة وتم تفريغه بالمكنسة الكهربائية لمدة 30 دقيقة لإزالة الغاز. تم إعداد MNPs بناءً على طريقة الترسيب المشترك الكلاسيكية. باختصار، 5.38 جم FeCl3· 6H2O و1.98 جرام FeCl2· 4H2تم إذابة O في 200 مل H2O. ثم تم إسقاط 7 مل 25% من هيدروكسيد الأمونيوم في الخليط، والذي تم التقليب بشكل مستمر لمدة 3 ساعات. تم بعد ذلك غسل الجزيئات المجمعة بالماء ثلاث مرات وتعديلها مرة أخرى بواسطة بروبيل ميثاكريلات 3- (تريميثوكسي سيليل) في الإيثانول بتركيزات 1 ٪ بالوزن و0.5 ٪ بالوزن عند 80 درجة مئوية لمدة 1 ساعة (المرجع XNUMX). 20). تم جمع MNPs بعد الغسيل بالإيثانول ثلاث مرات. تم تحضير مقاوم الضوء المغناطيسي المرن عن طريق خلط MNPs في مقاوم الضوء المرن بتركيز 5٪ أو 10٪ للسلحفاة الدقيقة الخاصة التي تحتوي على تركيز مزدوج من MNPs. أخيرًا، تمت فقاقيع مقاوم الضوء المغناطيسي المرن باستخدام N2 لمدة 30 دقيقة ثم يتم تفريغها بالمكنسة الكهربائية لمدة 30 دقيقة. يجب دائمًا حفظ مقاوم الضوء المحضر بعيدًا عن الضوء عند درجة حرارة 4 درجات مئوية قبل الاستخدام.
التحليل العددي
لتصميم الهياكل المجهرية بكفاءة بناءً على خصائص المواد، تم إجراء عمليات محاكاة للتنبؤ بتحول شكل الهياكل المجهرية قبل التصنيع. للحصول على النتائج المعروضة في التين. 1d و 6d، وتين البيانات الموسعة. 3 و 7، استخدمنا وحدة الفيزياء المتعددة المعرفة من قبل المستخدم لبرنامج تحليل العناصر المحدودة التجاري Comsol. واعتبرت جميع المواد الصلبة والسوائل غير قابلة للضغط. معامل يونج E تم ضبطه على 0.422 ميجا باسكال لمقاييس القوة الدقيقة و1.525 ميجا باسكال للمكونات المرنة الأخرى، وفقًا لنتائج التوصيف الميكانيكي للناتئ الناتئ. تم تحديد نسبة بواسون لجميع المواد على أنها 0.49، على افتراض أن المادة شبه غير قابلة للضغط. في جميع عمليات المحاكاة، تم تعيين وسط الحيوانات المنوية (SP-TALP) كسائل نيوتوني بكثافة 103 كجم م-3 واللزوجة 1 مللي باسكال. أثناء تحليل العناصر المحدودة، تم إعطاء الحمل المطبق كدالة لعزم الدوران المغناطيسي في نظام الإحداثيات المحلي. العزم المغناطيسي Tm تم حسابه باستخدام دالة مبسطة مطبقة على المادة المغناطيسية الناعمة51:
$$begin{array}{l}{T}^{{mathrm{m}}}=frac{chi V}{mu }{B}^{2},sin left(theta -arctanleft(tantheta times frac{1) +0.118chi }{1+0.432chi }يمين)يمين)sqrt{{يسار(فارك{costheta }{1+0.118chi }يمين)}^{2}+{يسار(فارك{sintheta }{1+0.432chi } حق)}^{2}}نهاية {صفيف}$$
أين θ هي الزاوية من المجال المغناطيسي بكثافة تدفق قدرها B إلى المحور المغناطيسي السهل للقطعة؛ χ, V و μ تمثل القابلية المغناطيسية والحجم الأكبر للقطعة والنفاذية المغناطيسية للماء (انظر التفاصيل في النص التكميلي 2). تم تطبيق الأحمال الحدودية لمحاكاة الميكانيكا بالتوازي مع المقطع العرضي للينابيع المرنة في نظام الإحداثيات المحلي. عزم الدوران المغناطيسي المطبق على زعانف السلحفاة الدقيقة الموضح في الشكل 1. 6d تم حسابها وفقا للمعادلة أعلاه، وذلك من خلال تبسيط الزعانف كأشكال مستطيلة مثل الإسقاط في بعدين.
علاوة على ذلك، تم تحليل البطريق الصغير باستخدام نموذج حركي تم حله بواسطة الطريقة التكرارية من الدرجة الرابعة Runge-Kutta باستخدام MATLAB. كما هو مبين في الشكل البيانات الموسعة 6d، تم تبسيط زعانف البطريق الصغير والجذع على شكل مكعبات. تم تبسيط المكونات المرنة كالينابيع الخطية. تم الحصول على صلابة الانحناء للمكون المرن من خلال ملاءمة عزم الدوران المغناطيسي المتوازن مع زاوية الانحراف، والتي يتم قياسها بنصف الزاوية المتنوعة لزعانفتين في كل مجال مغناطيسي. يمكن العثور على معلمات محاكاة إضافية في النص التكميلي 2. ثم تم استخدام نتائج المحاكاة لتوجيه تصميم وتصنيع الهياكل المجهرية، وتم التحقق من صحتها أيضًا من خلال النتائج التجريبية.
تصنيع البنية المجهرية
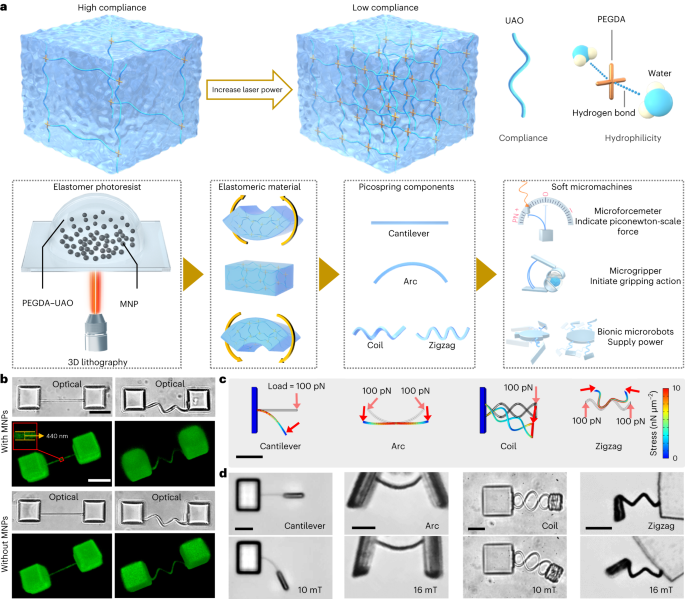
تم تصنيع الهياكل المجهرية باستخدام نظام الكتابة بالليزر المباشر ثلاثي الأبعاد (Photonic Professional GT، Nanoscribe). أثناء التصنيع، تم ضبط طاقة الليزر على 3 ميجاوات لجميع الأجزاء الصلبة، و25.0 ميجاوات للنوابض المستشعرة للقوة و5.5 ميجاوات لجميع المكونات المرنة الأخرى، ما لم ينص على خلاف ذلك. بعد التعرض، تم تطوير العينة في الأسيتون لمدة 6.0 ساعة لإزالة جميع المكونات غير المبلمرة. كما هو مبين في الشكل البيانات الموسعة 1a، تم تغيير البيئة من الأسيتون إلى الوسط المائي باستخدام حمض البلورونيك F127 (PF127) كمثخن تدريجيًا بمعدل 200 ميكرولتر دقيقة-1 لمدة 12 ساعة. بعد ذلك، تم استبدال المحلول بلطف بـ SP-TALP بواسطة ماصة. تم الحفاظ على التكامل الهيكلي للبنى المجهرية المستندة إلى picospring جيدًا بعد هذه العمليات (البيانات الموسعة الشكل XNUMX). 1b). على وجه الخصوص، في تجربة microgripper، تم أيضًا استبدال SP-TALP بوسائط خلوية تحاكي سائل قناة البيض (وسائط خلوية تحتوي على 0.4% ميثيل سلولوز).52.
أثناء تصنيع المذبذب الصغير، والمذبذب الصغير ذو الزنبرك اللولبي، ومقياس القوة الدقيقة، تم صقل الركيزة الزجاجية قبل الاستخدام لتجنب انفصال الهياكل المجهرية عن الركيزة. تم استخدام 3- (تريميثوكسيسيليل) بروبيل ميثاكريلات لربط مجموعات طرفية الميثاكريلات على الركيزة، مما يشكل رابطة تساهمية بين الركيزة الزجاجية ومقاوم الضوء المغناطيسي المرن.53.
أثناء تصنيع السلحفاة الدقيقة، تم إجراء التعريض مرتين باستخدام مقاوم الضوء مع أو بدون MNPs. أولاً، تم استخدام مقاوم الضوء المرن بدون MNPs لتصنيع الجذع. بعد ذلك، تم استبدال مقاوم الضوء بمقاوم ضوئي مرن مغناطيسي. تم لصق الركيزة الزجاجية باستخدام الشعيرات الدموية الزجاجية كمؤشر محاذاة ليتم محاذاته مع خطوط التجزئة المحددة مسبقًا على حامل العينة لمحاذاة العينة مع نفس موضع التعرض الأول. تم العثور على الأصل مرة أخرى بناءً على موضع الجذع المُصنع وتم تصحيح رمز الهيكل بزاوية محددة بناءً على تغيير اتجاه الجذع لتعزيز دقة التصنيع إلى الحد الأقصى. ثم تم إجراء التعريض الثاني لتصنيع الزعانف والمكونات المرنة.
توصيف المواد
تم استخدام مجهر طيف ليزر متحد البؤر (Zeiss LSM 980) للحصول على هندسة ثلاثية الأبعاد لمقياس القوة الدقيقة عند ليزر الإثارة البالغ 3 نانومتر واكتشاف الانبعاثات بمقدار 488 نانومتر. تم استخدام ImageJ لإنشاء نموذج ثلاثي الأبعاد للهيكل وقياس الأبعاد.
تمت معايرة الخاصية المرنة للكابولي بواسطة نظام المصيدة الضوئية (Lumicks C-Trap). تم استخدام خرزات دقيقة من البوليسترين بحجم خمسة ميكرومترات لمعايرة قوة الليزر للمصيدة الضوئية، مما يعطي ثوابت قوة الاحتجاز لبعض قوى الليزر. تم بعد ذلك سحب الخرزات الدقيقة لتشويه مقياس القوة الدقيقة ببطء قدر الإمكان، بحيث يمكن إهمال قوة السحب. يمكن بعد ذلك تحديد منحنى الانحناء لمقياس القوة الدقيقة فيما يتعلق بالقوة المطبقة عن طريق تسجيل مواضع الميكروبيد وزوايا انحراف الكابولي (انظر التفاصيل في النص التكميلي 1.2). تم تكرار كل مجموعة من القياسات على ثلاث عينات. تم تحليل الصور ومقاطع الفيديو باستخدام ImageJ وتم تزويد البيانات بـ OriginPro. تم اعتبار لزوجة SP-TALP تساوي 1 مللي باسكال. تم إجراء التوصيف الميكانيكي للأجزاء الصلبة المصنعة عند 25 ميجاوات باستخدام AFM، كما هو موضح في الشكل التكميلي XNUMX. 3 (انظر التفاصيل في النص التكميلي 1.2).
تميزت خاصية مغنطة المادة بمقياس مغناطيسي لجهاز التداخل الكمي فائق التوصيل (SQUID، التصميم الكمي) في درجة حرارة الغرفة مع مجالات مغناطيسية تصل إلى 100 ميلي تسلا. تم تحضير العينات كمجموعة مكونة من 8,848 مادة صلبة مستطيلة يبلغ طولها 15 ميكرومترًا ومساحة مقطعية تبلغ 16 ميكرومترًا2. تم حساب حساسية الحجم على أنها 0.1220، عن طريق تركيب المغنطة فيما يتعلق بالمجال المطبق باستخدام برنامج OriginPro.
قياس قوة الدفع بواسطة مقياس القوة الدقيقة
تم تصنيع الأنابيب الدقيقة ذات المحرك للحيوانات المنوية، والطائرات الدقيقة الأنبوبية، والحلقات الدقيقة بواسطة TPL باستخدام IP-DIP كمقاوم للضوء. بعد التعرض، تم تجفيف العينات في مجفف نقطة حرجة بعد 20 دقيقة من التطوير في mr-Dev 600 (Micro Resist) وغسلها ثلاث مرات باستخدام الأيزوبروبانول. تم طلاء الطبقات المعدنية من Fe (10 nm) / Ti (5 nm) على الأنابيب الدقيقة ذات المحرك للحيوانات المنوية والحلقات الدقيقة عن طريق الاخرق. تم طلاء طبقات Fe (10 نانومتر) / Ti (5 نانومتر) / Pt (10 نانومتر) على microjet الأنبوبي عن طريق ترسيب الشعاع الإلكتروني. تم إعداد الحيوانات المنوية البقري بعد البروتوكول المبلغ عنه مسبقًا2. تمت معالجة جميع العينات في محلول PF127 (1٪) لمدة 0.5 ساعة قبل الاستخدام. تم إجراء قياس محركات الحيوانات المنوية في غرفة مقياس القوة الدقيقة باستخدام 1 مل SP-TALP يحتوي على حوالي 103 الأنابيب الدقيقة و 104 الحيوانات المنوية. تم تشكيل محرك الحيوانات المنوية عندما أصبح الحيوان المنوي مقيدًا في أنبوب صغير عن طريق السباحة العشوائية. تم بعد ذلك توجيه محرك الحيوانات المنوية بواسطة المجال المغناطيسي الخارجي، عند حوالي 2 ميكرو تسلا، نحو شريط الحركة الخاص بمقياس القوة الدقيقة. تم ضبط المجال المغناطيسي بشكل عمودي على شريط الحركة، لتجنب تأثير عزم الدوران المغناطيسي على تشوه الكابولي. تم إجراء قياس microjets في SP-TALP الذي يحتوي على 1٪ H2O2 و0.1% كبريتات دوديسيل الصوديوم. تمت إضافة ما يقرب من 20 طائرة صغيرة وتوجيهها بنفس طريقة محركات الحيوانات المنوية. تم إجراء قياس microhelices من خلال تطبيق مجال مغناطيسي دوار قدره 10 mT عند 40 هرتز للتشغيل المغناطيسي. تم حساب قوة الدفع، أي القوة المرنة عندما تكون سرعة محرك الحيوانات المنوية صفرًا، عن طريق الاستيفاء الخطي في منحنى معايرة مقياس القوة الدقيقة باستثناء قوة دفع الطائرة الدقيقة، والتي تم الحصول عليها من منحنى محاكاة تحليل العناصر المحدودة من ميكروفورسيميتر القصير. تم إجراء جميع القياسات عند 37 درجة مئوية ما لم ينص على خلاف ذلك. تم تحليل مقاطع الفيديو والبيانات بواسطة ImageJ وOriginPro. تم حساب القوى المرنة عن طريق الاستيفاء في منحنى معايرة مقياس القوة الدقيقة في الشكل XNUMX. 3 ج ، د.
التحكم المغناطيسي في microgripper
تم إجراء التشغيل المغناطيسي بواسطة نظام كهرومغناطيسي (Magnebotix MFG 100-i). تم توليد المجالات المغناطيسية المتسلسلة زمنيا عن طريق التصميم Bx, By و Bz مع وظائف تدريجية. بعد عملية تغيير الوسائط، تمت معالجة عينات الروبوت الصغير والقابض الصغير في حمام الموجات فوق الصوتية لمدة 5 دقائق. ثم تم استخدام ماصة سعة 100 ميكرولتر لنفخ العينات بلطف باستخدام الوسائط لفصل الهياكل المجهرية تمامًا عن الركيزة دون تحويلها إلى سيلان. وفي تجارب الروبوتات الدقيقة، تم بعد ذلك تفريق العينات مباشرة في SP-TALP وتشغيلها في المجال المغناطيسي. في تجارب المقبض الدقيق، تمت إضافة محلول العينة باستخدام كائنات دقيقة معدة مسبقًا (الخرزات الدقيقة والجلطات الدقيقة). تم الحصول على عينة الميكروبيدات عن طريق تشتيت ميكروبات البوليسترين مقاس 5 ميكرومتر مباشرة عند حوالي 103 ml-1 كما يظهر في الشكل. 4 ج ، ص. تم تصنيع الجلطات الدقيقة المعتمدة على البروتين مع ألبومين المصل البقري باستخدام طريقة المستحلب الدقيق كما ورد سابقًا.2. تم تحضير محلول محاكاة سائل قناة البيض استنادًا إلى وسائط خلية هيلا التي تحتوي على 0.4٪ ميثيل سلولوز لتقليد الخاصية اللزجة المرنة للسائل. تم تطبيق المجالات المغناطيسية الدوارة لحركة القابض الصغير بطريقة متدحرجة وتم تطبيق المجالات المغناطيسية الموحدة لفتح دلو القابض. تمت معالجة مقاطع الفيديو والبيانات باستخدام ImageJ وOriginPro.
بعد التلاعب بخلايا هيلا، تم تلوين الخلية المستهدفة بواسطة مجموعة تلوين حية/ميتة تحتوي على ثنائي أسيتات الفلورسين ويوديد البروبيديوم. بعد فترة حضانة مدتها 10 دقائق، تم التقاط صور مضان متعددة القنوات باستخدام الإثارة عند طول موجة يبلغ 470 نانومتر للخلايا الحية (الطول الموجي للانبعاث 530 نانومتر) و540 نانومتر للخلايا الميتة (الطول الموجي للانبعاث 618 نانومتر). وفي وقت لاحق، تم استزراع خلية هيلا المستهدفة داخل دلو المقبض الدقيق لمدة 4 ساعات إضافية. تم بعد ذلك إجراء معالجة ثانية لنقل خلية هيلا على طول مسار مستطيل. بعد هذا التلاعب، تم الحصول على الصور مضان مرة أخرى. يشير وجود الفلورسنت الأخضر للخلية المستهدفة بعد التلاعب إلى أن المقبض الدقيق لم يكن له أي تأثير سلبي على قدرة الخلية على البقاء أثناء التلاعب، على عكس الفلورسنت الأحمر الذي لوحظ في الخلايا الميتة عشوائيًا. التحكم في اتجاه الخلية كما هو موضح في الشكل. 4g تم تنفيذه عن طريق تغيير اتجاه ناقل المجال المغناطيسي المطبق بعد أن استحوذ المقبض الصغير على كتلة الخلية. تم تطبيق مجال مغناطيسي موحد قدره 6 mT على طول +x الاتجاه لقبضة وتحديد الاتجاه الأولي للكتلة الخلية. لتغيير اتجاه الخلية في x-y (ياو) أو x-z (الملعب)، تم تدوير نواقل المجال المغناطيسي ببساطة على طول z or y المحاور بأي درجة حسب الطلب. لتغيير اتجاه الخلية في y-z المستوى (لفة) ، تم تطبيق مجال مغناطيسي دوار آخر عند 2 mT و 20 هرتز. اتجاه كتلة الخلية في y-z تم تغيير المستوى عن طريق تغيير محور دوران المجال المغناطيسي الدوار، في حين تم الاحتفاظ بالمجال المغناطيسي المنتظم البالغ 6 ميكرولتر على طول +x محور.
التحكم المغناطيسي في micropenguin وmicroturtle
لا تستطيع الروبوتات الدقيقة ذات الحركة المتماثلة مع الزمن تحقيق إزاحة صافية عند رقم رينولدز المنخفض54. تتمثل الإستراتيجية الفعالة لكسر التماثل الزمني في جعل اتجاه الروبوت الصغير أثناء التحول مختلفًا عن اتجاهه أثناء التعافي. كعرض توضيحي، قمنا بتنفيذ استراتيجية تبديل الاتجاه للتحكم في البطريق الصغير. شكل البيانات الموسعة 6a يصور تسلسل المجالات المغناطيسية بمدة دورة 9 s كما هو مبين في الشكل XNUMX. 6a: 0–1 s، تم تطبيق مجال مغناطيسي منتظم قدره 16 mT على طول x المحور (المراحل 1-2)؛ 1–1.5 ثانية، مجال مغناطيسي دوراني قدره 16 ميلي طن على طول y محور؛ 1.5–2.5 ثانية، مجال مغناطيسي موحد يبلغ 2 ميلي تسلا على طول z المحور (المراحل 2-3)؛ 2.5–4.5 ثانية، مجال مغناطيسي دوراني قدره 2 ميلي طن على طول y محور؛ 4.5–5.5 ثانية، مجال مغناطيسي موحد يبلغ 16 ميلي تسلا على طول x المحور (المراحل 3-4)؛ 5.5–6 ثانية، مجال مغناطيسي دوراني قدره 16 ميلي طن على طول y محور؛ 6–7 ثانية، مجال مغناطيسي موحد يبلغ 2 ميلي تسلا على طول z المحور (المراحل 4-1)؛ 7–9 ثانية، مجال مغناطيسي دوراني قدره 2 ميلي طن على طول y محور. بعد دورة مدتها 9 ثوانٍ، يستعيد البطريق الصغير اتجاهه الأصلي ويكتسب إزاحة صافية على طول الخط. x محور. شكل البيانات الموسعة 6b يُظهر تسلسلات المجال المغناطيسي مع مدة دورة تبلغ 5.5 ثانية للبطريق الصغير بطريقة سباحة أكثر كفاءة. في هذه الحالة، تم خلط المجالات المغناطيسية المنتظمة والدورانية، مما أتاح دوران البطريق الصغير وفتح الزعنفة وإغلاقها في وقت واحد.
أحد عيوب استراتيجية التحكم في تبديل الاتجاه هو الدوران المصاحب للروبوت بأكمله، على الرغم من إمكانية تطبيقه عالميًا على الروبوتات الدقيقة المرنة لتوليد إزاحة صافية. يمكن تجنب هذا الدوران باستخدام مجموعة من الزنبركات الصغيرة التي تحرك أجزاء متحركة مختلفة من الروبوتات الصغيرة ذات مغنطة غير متجانسة، على سبيل المثال، السلحفاة الدقيقة. شكل البيانات الموسعة 7a يُظهر نتائج محاكاة تحليل العناصر المحدودة، والتي تساعد في البحث عن الاتجاهات الأكثر كفاءة للمجالات المغناطيسية. يظهر تسلسل المجال المغناطيسي لاستراتيجية التحكم النهائية في شكل البيانات الموسعة. 7b. هناك حاجة إلى مجالات مغناطيسية موحدة فقط لتوليد إزاحة صافية للسلحفاة الدقيقة بسبب وظائف التشغيل والتخزين المؤقت المنسقة للأزواج اليسرى واليمنى من النوابض التي تتحكم في الزعانف المختلفة. تم بعد ذلك التحكم في السلحفاة الدقيقة فقط للتحرك في بعدين من الجسم x-y مستوى بدون دوران أو إزاحة في z المحور: 0–1 s، 2 mT على طول 15° (اتجاه عكس اتجاه عقارب الساعة إيجابي) من الاتجاه +y الاتجاه (المحور المتماثل للسلحفاة الدقيقة) ؛ 1–1.5 s، 2 mT على طول -75° من +y; 1.5–2.5 s، 16 mT على طول -105° على طول +y; 2.5-3 s، 2 mT على طول +y. تم إجراء جميع تجارب الحركة للروبوتات الدقيقة في برنامج تلفزيوني عند درجة حرارة 25 درجة مئوية. تحتوي السلحفاة الدقيقة على تركيز مزدوج من MNPs تم التحكم فيه بفترة ركوب الدراجات تبلغ 0.8 ثانية (البيانات الموسعة الشكل XNUMX). 8) مع أقسام طور قابلة للمقارنة تتراوح بين 0–0.25 ثانية و0.25–0.4 ثانية و0.4–0.7 ثانية و0.7–0.8 ثانية.
تقييم التوافق الحيوي
تم استخدام خلايا هيلا لتقييم التوافق الحيوي للآلات الدقيقة، وتحديدًا صفائف المقبض الدقيق. باختصار، تم وضع 7 عينات من صفائف microgripper ملفقة في آبار زراعة الخلايا المكونة من 6 لوحات جيدة ومليئة بـ 3 مل من وسائط الثقافة. تمتلئ آبار المجموعة الضابطة بالوسائط الخلوية فقط. تم زرع كل بئر بحوالي 105 خلايا هيلا. بعد حضانة لمدة 48 ساعة، تم صبغ بئر واحدة من مجموعة الميكروجريبر وواحدة من المجموعة الضابطة مباشرة باستخدام مجموعة الصبغ الحية/الميتة التي تحتوي على ثنائي أسيتات الفلورسين (1 ملغم مل)-1 في الأسيتون) ويوديد البروبيديوم (1 مجم مل-1 في برنامج تلفزيوني). تم التقاط صور مضان متعددة القنوات باستخدام المجهر الفلوري (Cell Observer، Carl Zeiss Microscopy) تحت الإثارة عند طول موجي قدره 470 نانومتر للخلايا الحية (طول موجة الانبعاث 530 نانومتر) و540 نانومتر للخلايا الميتة (طول موجة الانبعاث 618 نانومتر). بعد 72 ساعة من الحضانة، تم تجريب الآبار الـ 12 المتبقية من الخلايا، وصبغها وإحصائها تحت المجهر الفلوري. تم حساب صلاحية الخلية كنسبة عدد الخلايا الحية (الأخضر) إلى إجمالي عدد الخلايا.
الإحصاء والتكاثر
لم يتم استخدام أي طريقة إحصائية لتحديد حجم العينة مسبقًا. ولم يتم استبعاد أية بيانات من التحليلات. تم تعيين الخلايا والعينات الملفقة بشكل عشوائي للمجموعات المعنية قبل العملية. لم يكن أعمى المحققين للتخصيص أثناء التجارب وتقييم النتائج.
ملخص التقارير
مزيد من المعلومات حول تصميم البحوث متاح في ملخص تقارير حافظة الطبيعة مرتبطة بهذه المادة.
- محتوى مدعوم من تحسين محركات البحث وتوزيع العلاقات العامة. تضخيم اليوم.
- PlatoData.Network Vertical Generative Ai. تمكين نفسك. الوصول هنا.
- أفلاطونايستريم. ذكاء Web3. تضخيم المعرفة. الوصول هنا.
- أفلاطون كربون، كلينتك ، الطاقة، بيئة، شمسي، إدارة المخلفات. الوصول هنا.
- أفلاطون هيلث. التكنولوجيا الحيوية وذكاء التجارب السريرية. الوصول هنا.
- المصدر https://www.nature.com/articles/s41565-023-01567-0
- :يكون
- :ليس
- $ UP
- 1
- 10
- 100
- 12
- 15%
- 16
- 20
- 200
- 2010
- 2019
- 2020
- 22
- 23
- 24
- 25
- 28
- 30
- 35%
- 3d
- 40
- 49
- 51
- 54
- 7
- 70
- 72
- 8
- 80
- 9
- 98
- a
- من نحن
- فوق
- وفقا
- دقة
- التأهيل
- المكتسبة
- اكشن
- وأضاف
- إضافي
- تعديل
- المعاكسة
- بعد
- مرة أخرى
- AL
- محاذاة
- الانحياز
- المحاذاة
- الكل
- توزيع
- على طول
- دائما
- am
- an
- تحليل
- تحليل
- حلل
- مرساة
- و
- آخر
- أي وقت
- تطبيقي
- تطبيق
- ما يقرب من
- هي
- المنطقة
- حول
- مجموعة
- البند
- AS
- تقييم
- التقييم المناسبين
- تعيين
- At
- يرفق
- متاح
- تجنب
- تجنب
- محاور
- محور
- متوازن
- شريط
- على أساس
- BE
- وأصبح
- قبل
- ما بين
- ضربة
- الهيئات
- استراحة
- موجز
- by
- محسوب
- CAN
- لا تستطيع
- أسر
- القبض
- كارل
- حقيبة
- الخلية
- خلايا
- معين
- غرفة
- تغيير
- غير
- متغير
- تتميز
- المواد الكيميائية
- كلاسيكي
- انقر
- إغلاق
- كتلة
- الكود
- جمع
- تجاري
- مماثل
- مجمع
- عنصر
- مكونات
- من التركيز
- مقيدة
- يحتوي
- بشكل متواصل
- تباين
- مراقبة
- ذو شاهد
- السيطرة
- رابطة
- منسق
- تصحيح
- استطاع
- معدود
- تساهمي
- حرج
- ثقافة
- منحنى
- دورة
- البيانات
- ميت
- حدد
- الدرجة العلمية
- الطلب
- كثافة
- تصميم
- تصميم
- على الرغم من
- تفاصيل
- كشف
- مصمم
- المتقدمة
- التطوير التجاري
- جهاز
- مختلف
- الأبعاد
- مباشرة
- اتجاه
- مباشرة
- مساوئ
- مشتت
- الإزاحة
- فعل
- مضاعفة
- قيادة
- إسقاط
- مجفف
- مدة الأقامة
- أثناء
- e
- E & T
- كل
- سهل
- ed
- فعال
- بكفاءة
- العنصر
- انبعاث
- تمكين
- تعزيز
- البيئة
- إنزيمي
- الأثير (ETH)
- مثال
- إلا
- استبعاد
- تجربة
- تجريبي
- تجارب
- تعرض
- مدد
- خارجي
- Fe
- حقل
- مجال
- تين
- الشكل
- معبأ
- نهائي
- أخيرا
- الاسم الأول
- تركيبات
- مائع
- تدفق
- متابعيك
- في حالة
- القوة
- القوات
- شكلت
- وجدت
- تبدأ من
- تماما
- وظيفة
- وظائف
- إضافي
- علاوة على ذلك
- الرأس مالية
- توليد
- ولدت
- توليد
- علم الهندسة
- معطى
- إعطاء
- زجاج
- تدريجيا
- أخضر
- تجمع
- مجموعات
- توجيه
- موجه
- كان
- نصفي
- التعامل
- مساعدة
- حائز
- HTTPS
- IEEE
- صور
- التأثير
- تنفيذ
- نفذت
- in
- التحضين
- وأشار
- مؤشر
- تأثير
- معلومات
- في البداية
- في الداخل
- المتكاملة
- تدخل
- إلى
- المحققون
- انها
- أبقى
- عدة
- الليزر
- طبقات
- اليسار
- الطول
- الحياة
- ضوء
- خطوط
- LINK
- مرتبط
- حي
- تحميل
- الأحمال
- محلي
- منخفض
- حقل مغناطيسي
- جعل
- التلاعب
- تلاعب
- أسلوب
- ملحوظ
- مادة
- المواد
- قياس
- قياس
- قياس
- قياسات
- ميكانيكي
- علم الميكانيكا
- الوسائط
- متوسط
- معدن
- طريقة
- الصغير
- المجهر
- المجهر
- دقيقة
- مختلط
- خلط
- مزيج
- ML
- نموذج
- تصميم
- تم التعديل
- وحدة
- الأكثر من ذلك
- أكثر فعالية
- أكثر
- اقتراح
- خطوة
- يتحرك
- MT
- متعدد
- تكنولوجيا النانو
- الطبيعة
- بحاجة
- صاف
- لا
- لا سيما
- عدد
- ملاحظ
- تحصل
- تم الحصول عليها
- of
- on
- على متن
- مرة
- فقط
- على
- جاكيت
- افتتاح
- تعمل
- عملية
- عمليات
- بصري
- or
- المنشأ
- أصلي
- أخرى
- وإلا
- خارج
- نتيجة
- أزواج
- موازية
- المعلمات
- أجزاء
- نظام
- تنفيذ
- فترة
- مرحلة جديدة
- المراحل
- رمية
- وضعت
- طائرة
- الطائرات
- أفلاطون
- الذكاء افلاطون البيانات
- أفلاطون داتا
- البوينت
- محفظة
- ان يرتفع المركز
- مواقف
- إيجابي
- ممكن
- قوة
- القوى
- تنبأ
- أعدت
- وجود
- قدم
- سابقا
- عملية المعالجة
- محترف
- إسقاط
- HAS
- الملكية
- دفع
- شراء
- كمية
- معدل
- نسبة
- تسجيل
- يستعيد
- استرجاع
- أحمر
- مرجع
- يعتبر
- الافراج عن
- المتبقية
- بعد
- إزالة
- متكرر
- استبدال
- وذكرت
- التقارير
- مثل
- بحث
- احترام
- هؤلاء
- النتائج
- حق
- جامد
- رجل الالي
- لفة
- المتداول
- غرفة
- s
- نفسه
- اصابات النخاع الشوكي
- الثاني
- أقسام
- انظر تعريف
- انظر التفاصيل
- طلب
- قطعة
- أجهزة الاستشعار
- تسلسل
- سيروم
- طقم
- الشكل
- الأشكال
- قصير
- ينبغي
- أظهرت
- يظهر
- مبسط
- تبسيط
- ببساطة
- محاكاة
- المحاكاة
- متزامنة
- المقاس
- ببطء
- صغير
- So
- صوديوم
- ناعم
- تطبيقات الكمبيوتر
- حل
- تختص
- محدد
- على وجه التحديد
- محدد
- طيف
- سرعة
- نطفة
- إحصائي
- الإستراتيجيات
- الهيكلي
- بناء
- بعد ذلك
- قابلية
- سباحة
- نظام
- اتخذت
- الهدف
- محطة
- نص
- أن
- •
- then
- تشبه
- ثيتا
- ثلاثة
- علامة
- الوقت
- مرات
- إلى
- الإجمالي
- نحو
- مسار
- عبر
- نقل
- محاصرة
- المعالجة
- مرتين
- اثنان
- فوق صوتي
- مع
- عالمي
- تستخدم
- مستعمل
- استخدام
- التحقق من صحة
- بقاء
- مقاطع فيديو
- حجم
- وكان
- غسل
- مياه
- طريق..
- we
- حسن
- الآبار
- كان
- متى
- التي
- في حين
- كامل
- مع
- بدون
- جاري الكتابة
- زفيرنت
- صفر