Einem aktuellen Studie, fehlerhafte Produkte kosten die Industrie von 2 bis 2012 über 2017 Milliarden US-Dollar. Die Fehlererkennung in der Fertigung ist ein wichtiger Geschäftsanwendungsfall, insbesondere in Branchen mit hochwertigen Produkten wie der Automobilindustrie. Dies ermöglicht eine frühzeitige Diagnose von Anomalien, um die Effizienz der Produktionslinie und die Produktqualität zu verbessern und Kapitalkosten zu sparen. Obwohl fortschrittliche Systeme zur Anomalieerkennung sowohl Sensoren als auch Internet-of-Things-Geräte (IoT) nutzen, um multimodale Daten zu sammeln und so die Leistung zu verbessern, ist Computer Vision nach wie vor ein gängiger Ansatz. Die Erkennung von Anomalien in Automobilteilen und -komponenten mithilfe von Computer Vision kann mithilfe normaler Bilder und sogar röntgenbasierter Bilder für Strukturschäden erfolgen. Jüngste Fortschritte in den Bereichen Deep Learning und Computer Vision haben es Wissenschaftlern und Herstellern ermöglicht, verbesserte Anomalieerkennungssysteme zu entwickeln, einschließlich der Erkennung von Oberflächenfehlern an Karosserieteilen und der Dellenerkennung in Fahrzeugen.
Die Anomalieerkennung besteht typischerweise aus zwei Aufgaben: der Feststellung, ob ein bestimmtes Produkt fehlerhaft ist oder nicht, und der Lokalisierung des Defekts – dem Prozess der Identifizierung der genauen Position eines Defekts innerhalb eines Bildes. In diesem Beitrag zeigen wir, wie wir eine End-to-End-Pipeline für Folgendes entworfen und implementiert haben:
- Fehlererkennung mit Amazon Lookout für Vision, ein Dienst für maschinelles Lernen (ML) zur Identifizierung von Anomalien in Bildern mithilfe von Computer Vision
- Fehlerlokalisierung durch überwachte und unüberwachte Ansätze Amazon Sage Maker
Der überwachte Ansatz basiert auf Single-Shot-MultiBox-Detektor (SSD) ist in Anwendungsfällen relevant, in denen wir über ausreichend gekennzeichnete Daten verfügen. Allerdings kann das Erstellen von Anmerkungen zu Bildern oft teuer und zeitaufwändig sein. Darüber hinaus sind anomale Bilder per Definition normalerweise nicht in großem Maßstab verfügbar. Für diese Anwendungsfälle stellen wir eine unbeaufsichtigte Fehlerlokalisierungsmethode basierend auf a vor Variations-Autoencoder (VAE).
Datenübersicht
Im Automobilbereich können die in der folgenden Tabelle aufgeführten häufigsten Arten von Mängeln wie folgt kategorisiert werden:
- Dimensional – Wie Ausrichtung, Ausrichtung und Rundheit
- Strukturell – Zum Beispiel Löcher, Schrauben und Klammern
- Oberfläche – Wie Kratzer, Risse, Abnutzung und Rauheit
- Betriebsmängel – Inkompatibilität mit Normen und Spezifikationen
In diesem Beitrag haben wir mit Automobilteilen wie Rädern und Achsschenkeln gearbeitet.
| Mängel | |
| Typen | Details |
| Dimensional | Abmessungen, Form, Positionierung, Ausrichtung, Ausrichtung, Rundheit, Ecken |
| Strukturell | Montage, Löcher, Schlitze, Nieten, Schrauben, Klammern |
| Fremdkörper, Staub, Bohrer, Schwarm | |
| Oberfläche | Grübchen, Kratzer, Risse, Verschleiß, Oberfläche, Rauheit, Textur, Nähte, Falten, Überlappungen, Kontinuität |
| Operatives | Unvereinbarkeit des Betriebs mit Standards und Spezifikationen |
Wir nutzten die GRIMA-Röntgendatenbank GDXray-Datensatz, das fünf Bildgruppen umfasst: Gießen, Schweißen, Gepäck, Natur und Einstellungen (siehe folgende Tabelle).
| Gruppe an | Klassen | Bilder |
| Casting | 67 | 2,727 |
| Schweißnähte | 3 | 88 |
| Gepäck | 77 | 8,150 |
| Natur | 13 | 8,290 |
| Einstellungen | 7 | 152 |
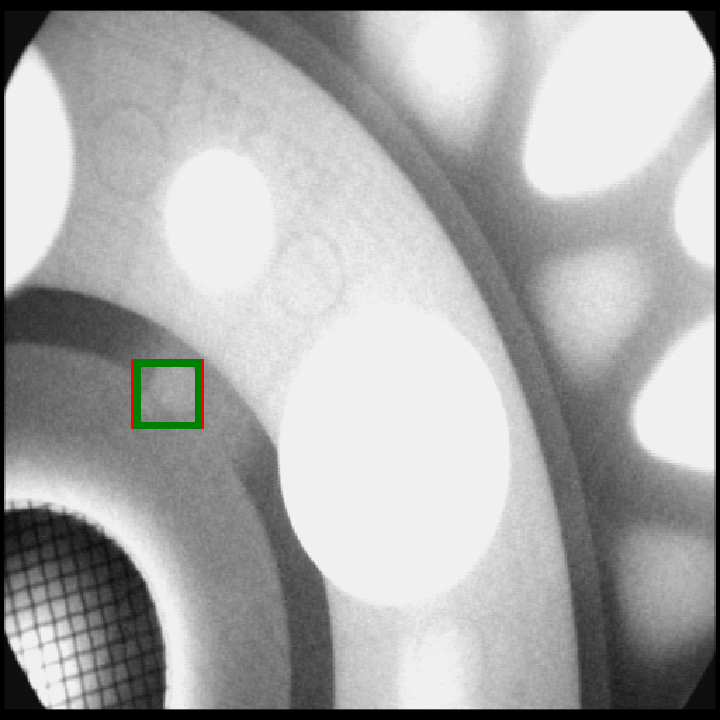
Wir haben die Gussdaten für dieses Projekt berücksichtigt, die 2,727 Röntgenbilder umfassten. Wir haben vier Bilder ausgeschlossen, da sie weder Rädern noch Achsschenkeln ähnelten, so dass 984 defekte und 1739 nicht defekte Bilder übrig blieben. Die folgenden Bilder zeigen einige Beispiele aus dem in dieser Studie verwendeten Datensatz.

Aufgrund unterschiedlicher Anforderungen an die zugrunde liegenden Modellierungsansätze verwendeten wir unterschiedliche Stichprobengrößen für Training und Tests. Die folgende Tabelle zeigt die Anzahl der Proben, die in jedem unserer Modelle für Training und Tests verwendet werden.
| Modell | Ausbildung | Testen |
| Lookout for Vision (Klassifizierung) | 2179 | 544 |
| Benutzerdefinierter Variations-Autoencoder (unüberwacht) | 1739 | 984 |
| Benutzerdefinierter Single-Shot-Multibox-Detektor (überwacht) | 544 | 1036 |
Fehlererkennung mit Lookout for Vision
Lookout for Vision ist ein ML-Dienst, der mithilfe von Computer Vision Fehler und Anomalien in visuellen Darstellungen erkennt. Mit Lookout for Vision können Fertigungsunternehmen die Qualität steigern und die Betriebskosten senken, indem sie Unterschiede in Bildern von Objekten im großen Maßstab schnell erkennen. Mit Lookout for Vision können Sie beispielsweise fehlende Komponenten in Produkten, Schäden an Fahrzeugen oder Strukturen, Unregelmäßigkeiten in Produktionslinien, winzige Defekte in Siliziumwafern und andere ähnliche Probleme identifizieren.
Lookout for Vision nutzt ML, um Bilder von jeder Kamera so zu sehen und zu verstehen, wie ein Mensch es tun würde, jedoch mit noch höherer Genauigkeit und in einem viel größeren Maßstab. Mit Lookout for Vision können Sie kostspielige und inkonsistente manuelle Inspektionen überflüssig machen und gleichzeitig die Qualitätskontrolle, Fehler- und Schadensbewertung sowie Compliance verbessern. Innerhalb weniger Minuten können Sie Lookout for Vision verwenden, um die Inspektion von Bildern und Objekten zu automatisieren, ohne dass ML-Kenntnisse erforderlich sind. Die Verwendung von Lookout for Vision zur Klassifizierung von Bildern als anomal (defekt) oder nicht defekt ist ein entscheidender Schritt in unserer Pipeline, um zu identifizieren, welche Bilder einer weiteren Analyse bedürfen.
Halten Sie Ausschau nach dem Visionsprozess und den Ergebnissen
Wir haben den Prozess der Modellentwicklung mit Lookout for Vision in drei Schritten abgeschlossen:
- Wir haben unsere Beispieldaten auf hochgeladen Amazon Simple Storage-Service (Amazon S3) in Schulungs- und Testordner und wir haben sie mit unserem Lookout for Vision-Projekt verknüpft.
- Wir haben unser Klassifizierungsmodell mithilfe des Lookout for Vision trainiert Benutzerschnittstelle Verwenden des hochgeladenen Datensatzes.
- Nach Abschluss des Trainings analysierten wir die Ergebnisse für den Testsatz, wie in der folgenden Abbildung dargestellt.

Lookout for Vision ermöglichte es uns, fehlerhafte Bilder in unserem Datensatz zu erkennen und unsere Proben für die Lokalisierung fehlerhafter Regionen im ausgewählten Datensatz vorzubereiten. Lookout for Vision half bei der korrekten Identifizierung von 183 anomalen Bildern, von denen 123 Proben für das Training des Defektlokalisierungsmodells verwendet wurden. Die restlichen 60 Proben wurden zum Testen verwendet. Die Lokalisierungspipeline und die Ergebnisse unseres Ansatzes werden im folgenden Abschnitt beschrieben. Die Verwendung eines Systems wie Lookout for Vision, das die Identifizierung fehlerhafter Teile erleichtert, gefolgt von unserer im nächsten Abschnitt beschriebenen Fehlerlokalisierungspipeline, ermöglicht eine durchgängige Fehlererkennungspipeline.
Fehlerlokalisierungspipeline
Bei der Fehlerlokalisierung handelt es sich um den Prozess der Identifizierung der genauen Position eines Fehlers innerhalb eines Bildes. Wir haben eine Fehlerlokalisierungspipeline mit zwei Optionen entwickelt. Mit der ersten Option können Sie Ihre Daten zum Trainieren von ML-Modellen bereitstellen. Wir beschreiben zwei Trainingsansätze, einen mit einer unbeaufsichtigten VAE und einen mit einer überwachten SSD-Methode. Mit der zweiten Option können Sie ohne Training nur vorab trainierte oder benutzerdefinierte Modelle für Vorhersagezwecke verwenden. Die folgende Abbildung veranschaulicht die Details der in dieser Arbeit entwickelten Pipeline.

Bei der ersten Option laden wir die Daten in einen S3-Bucket hoch, getrennt in fehlerhafte und nicht fehlerhafte Ordner, die in die Verarbeitungspipeline eingespeist werden. Das Folgende ist ein Ausschnitt des VAE-Schulungsprozesses:






- '
- "
- 100
- 7
- Adoption
- AI
- Algorithmus
- Alle
- Amazon
- Amazon Sage Maker
- Analyse
- Anomalieerkennung
- Architektur
- Auto
- Automobilindustrie
- Automobilindustrie
- AWS
- Baseline
- Milliarde
- Körper
- Box
- Geschäft
- Hauptstadt
- Fälle
- Einstufung
- Cloud
- Cloud-Einführung
- Code
- gemeinsam
- Unternehmen
- Compliance
- Computerwissenschaften
- Computer Vision
- weiter
- Kosten
- Erstellen
- Kunden
- technische Daten
- Datenwissenschaft
- Datenwissenschaftler
- Datenbase
- tiefe Lernen
- Entdeckung
- entwickeln
- Entwicklung
- Geräte
- Früh
- Effizienz
- ERFAHRUNGEN
- Merkmal
- Fed
- Abbildung
- Vorname
- Grün
- hier
- GUTE
- Ultraschall
- HTTPS
- Login
- identifizieren
- Image
- Einschließlich
- Erhöhung
- Branchen
- Energiegewinnung
- ING
- Internet
- Internet der Dinge
- iot
- IT
- Etiketten
- Sprache
- LERNEN
- lernen
- Line
- Lokalisierung
- Standorte
- Maschinelles Lernen
- Herstellung
- Landkarten
- Maske"
- Michigan
- ML
- Modell
- Modellieren
- Schwung
- Natürliche Sprache
- Verarbeitung natürlicher Sprache
- Netto-
- Netzwerk
- Objekterkennung
- Option
- Optionen
- Andere
- Leistung
- Pixel
- Prognose
- Prognosen
- Gegenwart
- Produziert
- Produkt
- Produktqualität
- Produktion
- Produkte
- Projekt
- Qualität
- Veteran
- Voraussetzungen:
- Die Ergebnisse
- Führen Sie
- sagemaker
- Skalieren
- Wissenschaft
- Wissenschaftler
- ausgewählt
- Sensoren
- Modellreihe
- kompensieren
- SGD
- Einfacher
- Singapur
- Lösungen
- Raumfahrt
- Geschwindigkeit
- Normen
- Anfang
- Bundesstaat
- Lagerung
- Studie
- Oberfläche
- System
- Systeme und Techniken
- Testen
- Zeit
- Ausbildung
- Transformation
- Gewerkschaft
- Universität
- Universität von Washington
- us
- Fahrzeuge
- Seh-
- Washington
- .
- Arbeiten
- X
