25 년 2023 월 XNUMX 일 (나노 워크 뉴스) 로봇 꿀벌 리플리컨트가 벌집의 순진한 여왕에게 집으로 돌아옵니다. 하지만 1982년 SF 스릴러에 나오는 반항적인 리플리컨트와는 달리 블레이드 러너, 이들은 일하기 위해 여기에 있습니다. 소형 로봇 공학, 인공 지능(AI) 및 기계 학습을 결합한 이 계획은 로봇 꿀벌이 예를 들어 적시에 올바른 음식을 먹이는 등 여왕벌의 알 낳기를 자극하는 것입니다.
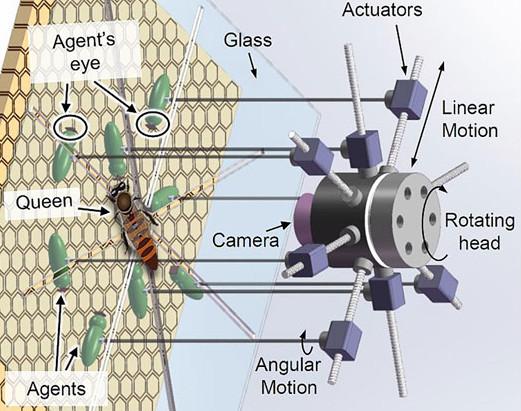 RoboRoyale 로봇 컨트롤러의 컨셉 디자인. (이미지: Farshad Arvin) 이에 앞서 RoboRoyale 팀은 고해상도 카메라와 이미지 분석 소프트웨어를 사용하여 여러 벌집에서 여왕벌을 관찰하여 그들의 행동에 대한 더 많은 통찰력을 얻었습니다. 팀은 벌집 내부에서 여왕벌의 궤적에 대한 150억 XNUMX천만 개 이상의 샘플과 다른 벌과의 사회적 상호 작용에 대한 자세한 영상을 캡처했습니다. 지금 데이터를 분석하고 있습니다. 전체 로봇 시스템이 충분히 테스트되면 RoboRoyale 연구원은 꿀벌뿐만 아니라 다른 유기체에서도 바이오 하이브리드 기술의 잠재력에 대한 이해를 촉진하기를 희망합니다. '그것은 주변 생태계에 긍정적인 영향을 미치는 새로운 유형의 지속 가능한 기술로 이어질 수 있습니다.'라고 Arvin은 말했습니다.
RoboRoyale 로봇 컨트롤러의 컨셉 디자인. (이미지: Farshad Arvin) 이에 앞서 RoboRoyale 팀은 고해상도 카메라와 이미지 분석 소프트웨어를 사용하여 여러 벌집에서 여왕벌을 관찰하여 그들의 행동에 대한 더 많은 통찰력을 얻었습니다. 팀은 벌집 내부에서 여왕벌의 궤적에 대한 150억 XNUMX천만 개 이상의 샘플과 다른 벌과의 사회적 상호 작용에 대한 자세한 영상을 캡처했습니다. 지금 데이터를 분석하고 있습니다. 전체 로봇 시스템이 충분히 테스트되면 RoboRoyale 연구원은 꿀벌뿐만 아니라 다른 유기체에서도 바이오 하이브리드 기술의 잠재력에 대한 이해를 촉진하기를 희망합니다. '그것은 주변 생태계에 긍정적인 영향을 미치는 새로운 유형의 지속 가능한 기술로 이어질 수 있습니다.'라고 Arvin은 말했습니다.
생존하고 번창하다.
영국 더럼 대학의 로봇 공학자이자 컴퓨터 과학자인 Farshad Arvin 박사는 "우리는 단 한 마리의 동물인 여왕벌과 상호 작용함으로써 전체 생태계에 영향을 미칠 계획입니다."라고 말했습니다. '알을 낳는 것과 같은 활동을 적시에 계속할 수 있다면 더 건강한 새끼와 더 활동적이고 건강한 군체를 가질 것으로 기대하고 있습니다. 그러면 수분이 향상될 것입니다.' 그것이 표면 위에서 진행되는 동안 실제 식물 및 곰팡이와 적응하고 상호 작용할 수 있는 형태 변형 로봇 뿌리는 지하에서 열심히 일하고 있습니다. 그곳에서 식물과 그들의 곰팡이 파트너는 방대한 네트워크를 형성합니다. 이 로봇 꿀벌과 뿌리는 EU가 자금을 지원하는 두 프로젝트에서 개발되고 있습니다. 두 이니셔티브 모두 생태계를 유지하는 데 핵심적인 인공 버전의 생명체가 실제 생명체와 환경이 생존하고 번성하는 데 도움이 될 수 있는 방법을 조사하는 동시에 사람들을 위한 식량이 풍부하게 유지되도록 합니다. 이는 특히 서식지 손실, 오염 및 기후 변화를 포함한 위협의 결과로 현재 급격한 개체수 감소에 직면한 많은 종의 경우 지구의 장기적인 미래에 매우 중요할 수 있습니다. 위험에 처한 것 중 하나는 곤충 수분의 핵심 종인 꿀벌입니다. 작물의 75%에 필요 전 세계적으로 인간의 식량을 위해 재배됩니다.여왕에 적합하다.
XNUMXD덴탈의 RoboRoyale 프로젝트 Arvin이 이끄는 회사는 마이크로로봇, 생물학적 및 기계 학습 기술을 결합하여 여왕벌의 웰빙을 육성합니다. 이 프로젝트는 European Innovation Council의 Pathfinder 프로그램에서 자금을 지원합니다. Arvin에 따르면 RoboRoyale의 고유한 측면은 식민지 전체가 아닌 여왕에게만 초점을 맞추는 것입니다. 그는 아이디어가 단일 핵심 유기체를 지원하는 것이 어떻게 전체 환경에서 생산을 자극하여 잠재적으로 수억 개의 유기체에 영향을 미칠 수 있는지를 입증하는 것이라고 말했습니다. 팀이 앞으로 몇 달 안에 테스트를 시작하기를 희망하는 다중 로봇 시스템은 시간이 지남에 따라 여왕벌의 알 낳기와 벌집의 행동에 영향을 미치는 화학적 향기인 페로몬 생산을 최적화하기 위해 손질하는 방법을 배우게 될 것입니다. 이 시스템은 오스트리아와 터키의 인공 유리 관측 벌통에 배치되고 있으며 일반적으로 여왕벌과 상호 작용하는 소위 궁중 꿀벌을 대체하도록 설계된 꿀벌 리플리컨트가 있습니다.무리를 위한 음식
한 가지 목표는 로봇 벌이 적절한 시기에 특정 단백질이 풍부한 음식을 여왕벌에게 제공하여 알 낳기를 자극할 수 있다는 것입니다. 결과적으로 꿀벌과 먹이를 찾는 비행의 증가는 식물 성장과 동물을 지원하기 위해 주변 생태계의 더 강력한 수분을 의미할 것이라는 예상되는 이점이 있습니다. 이 시스템은 XNUMX~XNUMX마리의 로봇 코트 꿀벌(일부는 마이크로 카메라가 장착되어 있음)이 외부에서 부착된 컨트롤러를 통해 관측 벌집 내부에서 조종할 수 있도록 합니다. 최종 목표는 로봇 꿀벌을 완전히 자율적으로 만드는 것입니다.
RoboRoyale 로봇 컨트롤러의 컨셉 디자인. (이미지: Farshad Arvin) 이에 앞서 RoboRoyale 팀은 고해상도 카메라와 이미지 분석 소프트웨어를 사용하여 여러 벌집에서 여왕벌을 관찰하여 그들의 행동에 대한 더 많은 통찰력을 얻었습니다. 팀은 벌집 내부에서 여왕벌의 궤적에 대한 150억 XNUMX천만 개 이상의 샘플과 다른 벌과의 사회적 상호 작용에 대한 자세한 영상을 캡처했습니다. 지금 데이터를 분석하고 있습니다. 전체 로봇 시스템이 충분히 테스트되면 RoboRoyale 연구원은 꿀벌뿐만 아니라 다른 유기체에서도 바이오 하이브리드 기술의 잠재력에 대한 이해를 촉진하기를 희망합니다. '그것은 주변 생태계에 긍정적인 영향을 미치는 새로운 유형의 지속 가능한 기술로 이어질 수 있습니다.'라고 Arvin은 말했습니다.
우드 와이드 웹
다른 프로젝트, 아이우드, 지하에 있는 매우 다른 유형의 소셜 네트워크를 탐색하고 있습니다. 제노아에 있는 이탈리아 공과대학(IIT)의 과학자들은 그들이 Wood Wide Web이라고 부르는 것을 연구하고 있습니다. 식물 뿌리는 균류의 공생 네트워크를 통해 서로 연결되어 영양분을 공급하고 자원을 공유하고 소통할 수 있도록 도와줍니다. 이러한 네트워크를 더 잘 이해하고 성장을 촉진하는 방법을 찾기 위해 I-Wood는 실제 식물 및 균류에 적응하고 상호작용할 수 있는 부드럽고 모양이 변하는 로봇 뿌리를 개발하고 있습니다. 아이디어는 로봇 식물 뿌리가 팁에 소형 3D 프린터를 사용하여 온도, 습도 및 사용 가능한 영양소와 같은 환경 요인에 반응하여 층별로 성장하고 분기할 수 있도록 하는 것입니다. 프로젝트를 이끄는 IIT 로봇 공학자 Barbara Mazzolai 박사는 '이러한 기술은 공생체와 숙주 사이의 관계에 대한 지식을 높이는 데 도움이 될 것입니다. Mazzolai의 팀은 곰팡이가 접종된 벼를 재배하는 온실을 가지고 있습니다. 지금까지 연구원들은 뿌리와 균류의 성장을 별도로 조사했다. 곧 그들은 발견한 것을 병합하여 둘 사이의 상호 작용이 어떻게, 언제, 어디서 발생하고 어떤 분자가 관련되는지 확인할 계획입니다. 이 발견은 나중에 I-Wood의 로봇에서 곰팡이와 뿌리 사이의 자연적 공생이 가능한 한 효과적으로 작동하도록 돕는 데 사용될 수 있습니다. 팀은 올해 말까지 온실에서 로봇 실험을 시작하기를 희망합니다. Mazzolai에 따르면 로봇 뿌리는 팁에 있는 센서의 도움을 받아 자율적으로 움직이도록 프로그래밍할 수 있습니다. 실제 뿌리나 지렁이가 지하로 이동하는 방식과 마찬가지로, 그들은 또한 더 부드럽거나 덜 압축된 토양으로 인해 이동하기 더 쉬운 통로를 찾을 것입니다.거래의 조정
그러나 로봇 공학과 자연을 결합하는 데는 어려움이 있습니다. 예를 들어 벌은 벌통에 있는 이물질에 민감하여 이를 제거하거나 왁스로 코팅할 수 있습니다. 이로 인해 추적 태그와 같은 항목을 사용하기가 까다로워집니다. 그러나 RoboRoyale의 Arvin에 따르면 팀이 코팅, 재료 및 냄새와 같은 태그의 요소를 조정한 후 꿀벌은 더 잘 받아들이게 되었습니다. 이러한 어려움에도 불구하고 Arvin과 Mazzolai는 로봇 공학과 인공 지능이 장기적으로 생태계와 환경을 유지하는 데 중요한 역할을 할 수 있다고 믿습니다. Mazzolai에게 매력은 식물, 동물 및 환경 간의 거의 이해되지 않은 상호 작용에 대한 심층 분석을 제공할 수 있는 기술의 잠재력에 있습니다. 예를 들어, 건강한 생태계를 유지하고 탄소를 가두어 지구 온난화를 제한하는 데 결정적인 역할을 하는 것으로 여겨지는 식물 뿌리와 균류의 지하 그물과 함께 프로젝트의 로봇 뿌리는 이러한 자연 과정을 보호하고 지원할 수 있는 방법을 밝히는 데 도움이 될 수 있습니다. Mazzolai는 '로봇 공학과 기술의 생체모방은 지구를 구하는 데 근본적인 역할을 할 것입니다.'라고 말했습니다.- SEO 기반 콘텐츠 및 PR 배포. 오늘 증폭하십시오.
- 플라토 블록체인. Web3 메타버스 인텔리전스. 지식 증폭. 여기에서 액세스하십시오.
- 출처: https://www.nanowerk.com/news2/robotics/newsid=62451.php
- 10
- 2022
- 3d
- 7
- 9
- a
- 소개
- 위의
- 수락
- 에 따르면
- 활동적인
- 방과 후 액티비티
- 활동
- 각색하다
- 영향을
- 에 영향을 미치는
- 후
- AI
- 외국인
- 중
- 분석
- 과
- 동물
- 동물
- 항소
- 인조의
- 인공 지능
- 인공 지능(AI)
- 양상
- 붙여진
- 오스트리아
- 자발적인
- 자율적으로
- 가능
- 가
- 꿀벌
- 존재
- 믿으세요
- 믿고
- 이익
- 더 나은
- 사이에
- 후원
- 지사
- 전화
- 카메라
- 탄소
- 센터
- 중심적인
- 과제
- 이전 단계로 돌아가기
- 화학
- 기후
- 기후 변화
- 식민지
- 결합
- 결합
- 오는
- 소통
- 컴퓨터
- 개념
- 연결
- 제어 장치
- 수
- 이사회
- 협의회
- 법정
- 결정적인
- 현재
- 데이터
- 날짜
- 감소
- 깊이
- 보여
- 배포
- 디자인
- 설계
- 무례
- 상세한
- 개발
- 개발
- 다른
- 마다
- 쉽게
- 생태계
- 생태계
- 효과적으로
- 요소
- 가능
- 수
- 보장
- 전체의
- 환경
- 환경
- 갖추어 준
- 유럽
- 유럽
- 예
- 기대하는
- 기대
- 탐색
- 마주보고
- 요인
- 멀리
- 먹이
- Find
- 항공편
- 초점
- 식품
- 음식
- 형태
- 기르다
- 에
- 가득 찬
- 충분히
- 기본적인
- 장기 부채로 바꾸는
- 미래
- 얻을
- 유리
- 글로벌
- 지구 온난화
- 세계적으로
- 골
- 간다
- 성장
- 성장한
- 성장
- 성장
- 무슨 일이
- 하드
- 건강
- 건강은 물론, 경제성까지!
- 도움
- 도움
- 여기에서 지금 확인해 보세요.
- 높은 해상도
- 하이브
- 홈
- 기대
- 희망
- 호스트
- 방법
- How To
- 그러나
- HTTPS
- 사람의
- 수백
- 수억
- 생각
- 영상
- 영향
- 개선
- in
- 기타의
- 포함
- 증가
- 영향
- 이니셔티브
- 혁신
- 통찰력
- 예
- 학회
- 인텔리전스
- 상호 작용하는
- 상호 작용
- 상호 작용
- 상호 작용
- 포함
- IT
- 이탈리아 사람
- 항목
- 유지
- 키
- 지식
- 층
- 리드
- 오퍼
- 배우다
- 배우기
- 빛
- 생활
- 긴
- 장기
- 찾고
- 오프
- 기계
- 기계 학습
- 확인
- 제작
- .
- 재료
- 병합
- 중간
- 수도
- 백만
- 수백만
- 개월
- 배우기
- 움직임
- 자연의
- 자연
- 네트워크
- 네트워크
- 일반적으로
- 소설
- 사물
- 제공
- ONE
- 최적화
- 기타
- 외부
- 부품
- 특별히
- 파트너
- 사람들
- 계획
- 행성
- 식물
- 플라톤
- 플라톤 데이터 인텔리전스
- 플라토데이터
- 연극
- 오염
- 인구
- 가능한
- 가능성
- 잠재적으로
- 이전에
- 프로세스
- 생산
- 프로그램
- 프로그램
- 프로젝트
- 프로젝트
- 보호
- 제공
- 제공
- 현실
- 관계
- 유적
- 제거
- 교체
- 연구원
- 자료
- 응답
- 결과
- 결과
- 쌀
- 위험
- 로봇
- 로봇
- 로봇
- 로봇
- 직위별
- 뿌리
- 말했다
- 절약
- 냄새
- 공상 과학
- 과학자
- 과학자
- 찾으라
- 민감한
- 센서
- 따로 따로
- 몇몇의
- 공유
- 단일
- SIX
- 냄새
- So
- 지금까지
- 사회적
- 소셜 네트워크
- 부드러움
- 소프트웨어
- 일부
- 예정입니다.
- 구체적인
- 스타트
- 강한
- 공부
- 이러한
- 충분한
- SUPPORT
- 지원
- 표면
- 주변
- 생존
- 지속가능한
- 공생
- 체계
- 팀
- 기술
- Technology
- 지원
- XNUMXD덴탈의
- 영국
- 그들의
- 일
- 올해
- 위협
- 사는 보람으로 삼다
- 을 통하여
- 시간
- 팁
- 도움말
- 에
- 추적
- 터키
- 회전
- Uk
- 이해
- 이해
- 유일한
- 대학
- 사용
- 거대한
- WAX
- 방법
- 웹
- 뭐
- 어느
- 동안
- 누구
- 넓은
- 의지
- 작업
- 겠지
- year
- 제퍼 넷