비례제어란?
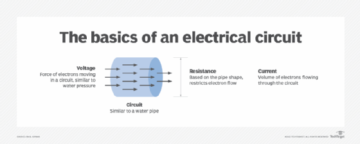
비례제어는 제어 시스템 응답(출력)이 설정값과 프로세스 변수의 현재 값 간의 차이에 비례하는 기술입니다.
많은 산업 환경의 제어 시스템과 일부 스마트 장치는 비례 제어를 사용합니다. 그것은 일반적이다 폐쇄 루프 제어 시스템 여기서 출력은 원하는 설정점에 최대한 가깝게 유지되어야 합니다.
비례 제어는 피드백 제어의 한 유형으로, 원하는 제어라고도 알려져 있습니다. 설정 점 (SP)를 실제 출력과 비교합니다. 여기서 실제 출력은 프로세스 변수(PV)의 현재 값입니다.
시스템은 두 값을 비교한 다음 항상 SP와 PV의 차이에 비례하도록 응답을 조정합니다. SP는 지속적으로 모니터링되며 SP/PV 차이는 비례 제어 동작을 수행하는 데 사용되는 오류 신호를 생성합니다.

비례 제어 작동 방식
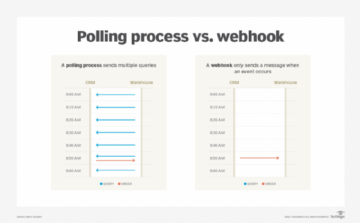
첫째, 비례 제어 장치 compares the SP value with the actual PV value. Then, the system’s 피드백 루프 작용합니다. 루프는 시스템 출력을 지속적으로 모니터링하고 이를 원하는 출력과 비교합니다. 그런 다음 출력이 원하는 값에 더 가까워지도록 입력이 조정됩니다.
컨트롤러가 오류 신호를 생성합니다. 마지막으로 오류 신호에 곱셈을 곱합니다. 인자 오류 신호에 비례하고 원하는 값에 최대한 가까운 출력을 생성합니다. 피드백 루프는 시스템이 조건 변화에 자동으로 조정되고 내부 또는 외부 교란에도 불구하고 안정적인 출력을 유지할 수 있도록 보장합니다.
비례 이득 계수 및 비례 제어기 출력
출력을 생성하기 위해 비례 제어기가 사용하는 곱셈 계수는 다음과 같이 알려져 있습니다. 비례 이득 계수. The higher the value of this factor, the faster the control system responds. Conversely, the lower the gain factor, the slower the system’s response.
It’s important to keep in mind that the output of the proportional controller depends on both the gain factor and the error signal. Thus, if the error signal is zero — that is, if there is no difference between the SP and actual PV — then the controller’s output is zero, regardless of the gain factor, since multiplying anything with zero yields zero output. If the gain factor is set to too high, the proportional controller behaves like an 온-오프 컨트롤러.
비례 제어기의 수학적 표현
비례 제어기의 작동은 수학적으로 표현될 수 있습니다.
다음을 고려하면 :
- y(t) = 비례 제어기의 출력
- e(t) = 오류 신호
- K = 비례 이득 계수
- b = 바이어스 신호
다음 :
- y(t) = K ⋅ e(t) + b
In the above formula, the output and error signal are variables, while bias is a constant value. Bias is added because it gives a command to the proportional controller when the error signal goes to zero. The command ensures that the controller’s output is nonzero.

비례 제어의 예
적응 형 크루즈 컨트롤 비례제어의 대표적인 예이다. 적응형 크루즈 컨트롤 시스템에서 스로틀 입력은 경사 감소와 운동량 증가에 반응하도록 가변적으로 조정됩니다. 또한, 제어되는 차량의 스로틀은 앞에 있는 다른 차량의 근접성에 따라 가변적으로 조정됩니다. 긴급 충돌 방지를 위해 별도의 비례 제어 시스템이 뒤따르는 차량에 너무 가깝거나 급격하게 접근할 경우 브레이크에 점진적으로 작용합니다.
비례 제어의 용도 및 장점
비례 제어는 PV를 더 엄격한 허용 오차로 유지하고 적시에 시스템 응답성을 달성해야 하는 상황에서 자주 사용됩니다. 후자는 비례 제어가 온-오프 제어와 관련된 순환 시간을 제거하기 때문에 가능합니다. PV와 SP의 차이가 작아야 하고 편차가 급격하지 않은 경우에도 비례 제어기가 적합합니다.
다른 유형의 제어 시스템과 달리 비례 제어기는 SP와 PV의 차이가 감소할 때 정상 상태 오류를 줄이므로 시스템 안정성을 향상시킵니다. 또한 과감쇠된 시스템의 응답 속도도 향상됩니다.
비례제어의 단점
비례 제어기의 한 가지 단점은 입력 신호와 출력 신호 사이에 정상 상태 오류가 발생한다는 것입니다. 이 오류는 오프셋. 오프셋은 일정 시간이 지나면 일정해지며 제거할 수 없습니다.
또 다른 단점은 비례 컨트롤러가 있는 시스템에서 오버슈트와 언더슈트가 모두 흔히 발생하여 성능과 출력 속도에 영향을 미칠 수 있다는 것입니다. 오버슈트는 일부 입력에 대한 응답으로 시스템 출력이 최종 값을 초과하는 양을 나타냅니다. 언더슈트는 출력이 원하는 최종 값에 미치지 못하는 양입니다.
[포함 된 콘텐츠]
비례 제어 vs. 온-오프 제어
온오프 제어라고도 합니다. 뱅뱅 컨트롤. 온-오프 제어를 사용하는 장치에 비해 비례 제어를 사용하는 장치는 더 복잡합니다. 또한 비례 제어에는 피드백 메커니즘을 통한 세밀한 제어가 포함됩니다. 이러한 시스템에서 가변 응답은 PV와 원하는 최적 SP 간의 차이에 선형적으로 비례합니다. 이는 컨트롤러의 반응과 변수에 영향을 미치는 메커니즘이 더 큰 차이에 대해 더 큰 반응을 만들고 더 작은 차이에 대해 더 작은 변화를 만든다는 것을 의미합니다.
또한 PV에 대한 응답의 가변성은 비례 제어 시스템에서 더 엄격한 허용 오차를 유지할 수 있음을 의미합니다. 비례제어는 프로세스와 생산이 더욱 안전해졌습니다. 특히 다음과 같은 경우 더욱 안정적입니다. 자동화 위험한 기계, 민감한 물질을 취급하는 동안 및 화학 공정 시스템에서.
에 대해 자세히 알아보기 자율주행 자동차와 작동 원리, 그리고 방법을 참조하십시오 자동화는 NetOps를 다음 단계로 끌어올립니다..
- SEO 기반 콘텐츠 및 PR 배포. 오늘 증폭하십시오.
- PlatoData.Network 수직 생성 Ai. 자신에게 권한을 부여하십시오. 여기에서 액세스하십시오.
- PlatoAiStream. 웹3 인텔리전스. 지식 증폭. 여기에서 액세스하십시오.
- 플라톤ESG. 자동차 / EV, 탄소, 클린테크, 에너지, 환경, 태양광, 폐기물 관리. 여기에서 액세스하십시오.
- BlockOffsets. 환경 오프셋 소유권 현대화. 여기에서 액세스하십시오.
- 출처: https://www.techtarget.com/whatis/definition/proportional-control
- :이다
- :아니
- :어디
- $UP
- 1
- 31
- 33
- 39
- 40
- a
- 소개
- 위의
- 달성
- 동작
- 행위
- 실제
- 추가
- 조정
- 장점
- 영향을
- 에 영향을 미치는
- 후
- 또한
- 항상
- 양
- an
- 및
- 아무것도
- 있군요
- AS
- 관련
- 자동적으로
- BE
- 때문에
- 된다
- 사이에
- 바이어스
- 두
- 가져
- 돋보이게
- by
- CAN
- 자동차
- 이전 단계로 돌아가기
- 변경
- 화학
- 닫기
- 면밀히
- 자세히
- COM
- 제공
- 공통의
- 비교
- 비교
- 복잡한
- 조건
- 상수
- 함유량
- 지속적으로
- 제어
- 통제
- 제어 장치
- 거꾸로
- 순항
- Current
- 위험한
- 감소하다
- 정의
- 따라
- 원하는
- 무례
- 디바이스
- 차이
- 불리
- 극적으로
- ...동안
- 제거 된
- 거림
- 임베디드
- 비상 사태
- 보장
- 오류
- 특히
- 에테르 (ETH)
- 예
- 초과
- 외부
- 인자
- 폭포
- 빠른
- 피드백
- 최후의
- 최종적으로
- 다음에
- 수행원
- 럭셔리
- 공식
- 에
- 앞
- 게다가
- 이득
- 생성
- 생성
- 제공
- 간다
- 점차적으로
- 큰
- 처리
- 여기에서 지금 확인해 보세요.
- 높은
- 더 높은
- 방법
- HTTPS
- 사람의
- ICON
- if
- 일러스트
- 중대한
- 향상
- in
- 증가
- 산업
- 입력
- 입력
- 상호 작용
- 내부의
- 으로
- 포함
- IT
- 유지
- 알려진
- 처럼
- 절감
- 기계
- 유지하다
- 확인
- 제작
- .
- 재료
- 수학의
- 수학적으로
- XNUMX월..
- 방법
- 기구
- 신경
- 기세
- 모니터링
- 모니터
- 배우기
- 곱하기
- 절대로 필요한 것
- 근접
- 필요
- 다음 것
- 아니
- of
- 오프셋
- 자주
- on
- 최적의
- or
- 기타
- 출력
- 수행
- 성능
- 영화
- 플라톤
- 플라톤 데이터 인텔리전스
- 플라토데이터
- 연극
- 가능한
- 방법
- 생산하다
- 생산
- 반응
- 감소
- 의미
- 관계없이
- 신뢰할 수있는
- 대표
- 대표되는
- 필수
- 응답
- s
- 섹션
- 참조
- 민감한
- 별도의
- 세트
- 설정
- 짧은
- 신호
- 신호
- 이후
- 상황
- 작은
- 작은
- 스마트 한
- So
- 일부
- 속도
- 속도
- 안정
- 안정된
- 주 정부
- 이러한
- 적당한
- 체계
- 시스템은
- Technology
- 그
- XNUMXD덴탈의
- 그때
- 그곳에.
- 그들
- 이
- 을 통하여
- 그러므로
- 단단한
- 시간
- 에
- 공차
- 너무
- 두
- 유형
- 유형
- 사용
- 익숙한
- 사용
- 사용
- 가치
- 마케팅은:
- 변수
- 자동차
- 차량
- vs
- 잘
- 잘 알려진
- 뭐
- 언제
- 어느
- 동안
- 과
- 없이
- 일하는
- 일
- 산출량
- 유튜브
- 제퍼 넷
- 제로