การเตรียมโฟโตรีซิสต์แบบแม่เหล็กและยืดหยุ่น
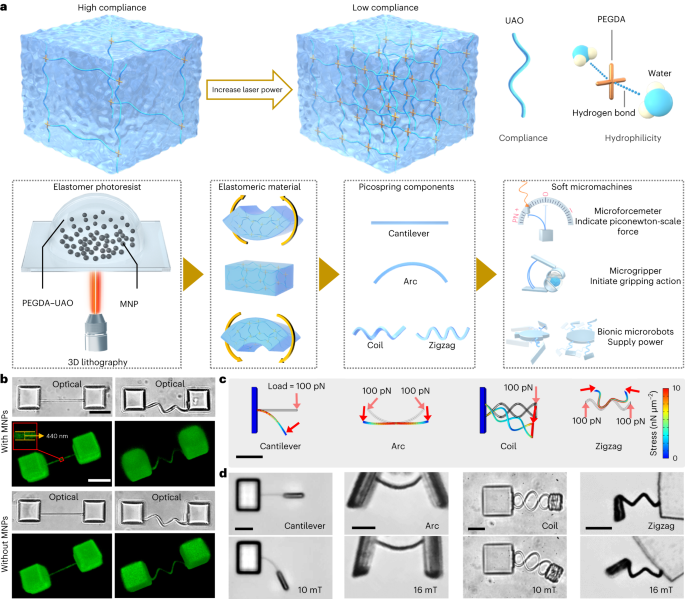
สารเคมีทั้งหมดซื้อจาก Sigma-Aldrich เว้นแต่จะระบุไว้เป็นอย่างอื่น ตัวต้านทานแสงแบบยืดหยุ่นประกอบด้วยยูรีเทนอะคริเลตโอลิโกเมอร์ 70 เปอร์เซ็นต์โดยน้ำหนัก, โพลี (เอทิลีนไกลคอล) ไดอะคริเลต 28.40 เปอร์เซ็นต์โดยน้ำหนักเป็นตัวเชื่อมต่อขวาง, 1-(4-(2-(ไดเมทิลอะมิโน)เอทอกซี)ฟีนิล)-2-ฟีนิล-1-บิวทานอล 1.5 น้ำหนัก % เป็นตัวเร่งปฏิกิริยาด้วยแสง และสารเชิงซ้อนของ 2,2,6,6-เตตระเมทิลไพเพอริดีน-1-ออกซิล 0.05 % โดยน้ำหนัก และเมทิล เมทาคริเลต 0.05 % โดยน้ำหนักเป็นสารดับ ของผสมถูกทำให้เกิดฟองด้วยไนโตรเจนเป็นเวลา 30 นาทีและสุญญากาศเป็นเวลา 30 นาทีเพื่อขจัดก๊าซ MNP ถูกเตรียมตามวิธีการตกตะกอนร่วมแบบคลาสสิก โดยสรุป FeCl 5.38 กรัม3· 6H2O และ FeCl 1.98 กรัม2· 4H2O ถูกละลายใน 200 มล. H2O จากนั้นหยดแอมโมเนียมไฮดรอกไซด์ 7% 25 มล. ลงในส่วนผสม ซึ่งคนอย่างต่อเนื่องเป็นเวลา 3 ชั่วโมง จากนั้นอนุภาคที่เก็บรวบรวมถูกล้างด้วยน้ำสามครั้งและดัดแปลงเพิ่มเติมด้วย 3-(ไตรเมทอกซีไซลิล)โพรพิล เมทาคริเลตในเอธานอลที่ความเข้มข้น 1 % โดยน้ำหนักและ 0.5 % โดยน้ำหนักที่ 80 °C เป็นเวลา 1 ชั่วโมง (อ้างอิง 20). เก็บ MNP หลังจากล้างด้วยเอทานอลสามครั้ง photoresist แบบยืดหยุ่นแม่เหล็กถูกเตรียมโดยการผสม MNP ลงใน photoresist แบบยืดหยุ่นที่ความเข้มข้น 5% หรือ 10% สำหรับ microturtle พิเศษที่มี MNP ที่มีความเข้มข้นเป็นสองเท่า ในที่สุด โฟโตรีซิสต์แบบยืดหยุ่นแม่เหล็กก็เกิดฟองด้วย N2 เป็นเวลา 30 นาที และดูดฝุ่นเป็นเวลา 30 นาที โฟโตรีซิสต์ที่เตรียมไว้ควรเก็บให้พ้นแสงที่อุณหภูมิ 4 °C ก่อนใช้งาน
การวิเคราะห์เชิงตัวเลข
ในการออกแบบโครงสร้างจุลภาคอย่างมีประสิทธิภาพตามคุณสมบัติของวัสดุ จึงมีการจำลองเพื่อคาดการณ์การเปลี่ยนแปลงรูปร่างของโครงสร้างจุลภาคก่อนการแปรรูป สำหรับผลลัพธ์ที่แสดงในรูป 1d และ 6d, และ Extended Data รูปที่ 3 และ 7เราใช้โมดูลมัลติฟิสิกส์ที่ผู้ใช้กำหนดของซอฟต์แวร์วิเคราะห์องค์ประกอบไฟไนต์เชิงพาณิชย์ Comsol ของแข็งและของเหลวทั้งหมดถือว่าอัดตัวไม่ได้ โมดูลัสของยัง E ถูกตั้งค่าเป็น 0.422 MPa สำหรับไมโครฟอร์ซมิเตอร์ และ 1.525 Mpa สำหรับส่วนประกอบยืดหยุ่นอื่นๆ ตามผลการศึกษาคุณลักษณะทางกลของพิโคสปริงคานยื่น อัตราส่วนปัวซองสำหรับวัสดุทั้งหมดถูกกำหนดไว้ที่ 0.49 โดยสมมติว่าวัสดุเป็นแบบกึ่งอัดไม่ได้ ในการจำลองทั้งหมด ตัวกลางอสุจิ (SP-TALP) ถูกตั้งค่าเป็นของเหลวแบบนิวตันโดยมีความหนาแน่น 103 กก ม-3 และความหนืด 1 mPa·s ในระหว่างการวิเคราะห์องค์ประกอบไฟไนต์ โหลดที่ใช้ถูกกำหนดเป็นฟังก์ชันของแรงบิดแม่เหล็กในระบบพิกัดเฉพาะที่ แรงบิดแม่เหล็ก Tm คำนวณโดยใช้ฟังก์ชันแบบง่ายที่ใช้กับวัสดุแม่เหล็กอ่อน51:
$$begin{array}{l}{T}^{{mathrm{m}}}=frac{chi V}{mu }{B}^{2},sin left(theta -arctanleft(tantheta คูณ frac{1 +0.118chi }{1+0.432chi }ขวา)ขวา)sqrt{{left(frac{costheta }{1+0.118chi }right)}^{2}+{left(frac{sintheta }{1+0.432chi } right)}^{2}}สิ้นสุด{array}$$
ที่ไหน θ คือมุมจากสนามแม่เหล็กที่มีความหนาแน่นฟลักซ์เท่ากับ B ไปยังแกนแม่เหล็กอย่างง่ายของเซ็กเมนต์ χ, V และ μ แสดงถึงความไวต่อแม่เหล็กและปริมาตรจำนวนมากของเซ็กเมนต์ และการซึมผ่านของแม่เหล็กของน้ำ (ดูรายละเอียดในข้อความเสริม 2). โหลดขอบเขตของการจำลองกลศาสตร์ถูกนำมาใช้ขนานกับหน้าตัดของสปริงยืดหยุ่นในระบบพิกัดเฉพาะที่ แรงบิดแม่เหล็กที่ใช้กับครีบของเต่าไมโครดังแสดงในรูปที่ 6d คำนวณตามสมการข้างต้น โดยลดความซับซ้อนของฟลิปเปอร์ให้เป็นรูปทรงสี่เหลี่ยมผืนผ้าเป็นการฉายภาพในสองมิติ
ไมโครเพนกวินได้รับการวิเคราะห์เพิ่มเติมด้วยแบบจำลองจลนศาสตร์ที่แก้ไขได้โดยวิธีการวนซ้ำลำดับที่สี่ของ Runge–Kutta ด้วย MATLAB ดังแสดงในรูป Extended Data 6dครีบไมโครเพนกวินและลำตัวถูกทำให้เรียบง่ายเหมือนทรงลูกบาศก์ ส่วนประกอบที่ยืดหยุ่นถูกทำให้เรียบง่ายเหมือนสปริงเชิงเส้น ความแข็งในการดัดงอของส่วนประกอบยืดหยุ่นได้มาจากการปรับแรงบิดแม่เหล็กที่สมดุลให้สัมพันธ์กับมุมโก่ง ซึ่งวัดได้เท่ากับครึ่งหนึ่งของมุมที่แตกต่างกันของฟลิปเปอร์สองตัวที่แต่ละสนามแม่เหล็ก พารามิเตอร์การจำลองเพิ่มเติมสามารถพบได้ในข้อความเสริม 2. จากนั้นผลการจำลองจะถูกนำมาใช้เพื่อเป็นแนวทางในการออกแบบและการสร้างโครงสร้างจุลภาค และได้รับการตรวจสอบความถูกต้องเพิ่มเติมโดยผลการทดลอง
การประดิษฐ์โครงสร้างจุลภาค
โครงสร้างจุลภาคถูกสร้างขึ้นโดยใช้ระบบการเขียนด้วยเลเซอร์โดยตรง 3 มิติ (Photonic Professional GT, Nanoscribe) ในระหว่างการผลิต กำลังแสงเลเซอร์ถูกตั้งค่าเป็น 25.0 mW สำหรับชิ้นส่วนแข็งทั้งหมด 5.5 mW สำหรับพิโคสปริงที่ตรวจจับแรง และ 6.0 mW สำหรับส่วนประกอบยืดหยุ่นอื่นๆ ทั้งหมด เว้นแต่จะระบุไว้เป็นอย่างอื่น หลังจากการสัมผัส ตัวอย่างจะถูกพัฒนาในอะซิโตนเป็นเวลา 24 ชั่วโมงเพื่อกำจัดส่วนประกอบที่ไม่เป็นโพลีเมอร์ทั้งหมด ดังแสดงในรูป Extended Data 1aสภาพแวดล้อมเปลี่ยนจากอะซิโตนเป็นตัวกลางที่ใช้น้ำโดยมีกรดพลูโรนิก F127 (PF127) เป็นสารทำให้ข้นขึ้นทีละน้อยในอัตรา 200 ไมโครลิตรต่อนาที-1 เป็นเวลา 12 ชม. หลังจากนั้น ค่อยๆ แทนที่สารละลายด้วย SP-TALP ด้วยปิเปต ความสมบูรณ์เชิงโครงสร้างของโครงสร้างจุลภาคที่มีพิโคสปริงได้รับการดูแลอย่างดีหลังการดำเนินการเหล่านี้ (รูปที่ขยายข้อมูล 1b). โดยเฉพาะอย่างยิ่ง ในการทดลองไมโครกริปเปอร์นั้น SP-TALP ยังถูกแทนที่ด้วยสื่อเซลล์ที่เลียนแบบของเหลวในท่อนำไข่ (สื่อเซลล์ที่มีเมทิลเซลลูโลส 0.4%)52.
ในระหว่างการผลิตไมโครออสซิลเลเตอร์ ไมโครออสซิลเลเตอร์คอยล์สปริง และไมโครฟอร์ซมิเตอร์ พื้นผิวแก้วจะถูกไซลาไนซ์ก่อนใช้งานเพื่อหลีกเลี่ยงการหลุดออกจากโครงสร้างจุลภาคจากซับสเตรต 3-(ไตรเมทอกซีไซลิล)โพรพิล เมทาคริเลตถูกใช้เพื่อยึดกลุ่มปลายเมทาคริเลตเข้ากับซับสเตรต ทำให้เกิดการเชื่อมโยงโควาเลนต์ระหว่างซับสเตรตแก้วและโฟโตรีซิสต์แบบยืดหยุ่นแม่เหล็ก53.
ในระหว่างการผลิตเต่าไมโคร การเปิดรับแสงจะดำเนินการสองครั้งโดยใช้โฟโตรีซิสต์ที่มีและไม่มี MNP ขั้นแรก มีการใช้โฟโตรีซิสแบบยืดหยุ่นที่ไม่มี MNP เพื่อสร้างเนื้อตัว หลังจากนั้นโฟโตรีซิสต์จะถูกแทนที่ด้วยโฟโตรีซิสต์แบบยืดหยุ่นแบบแม่เหล็ก พื้นผิวแก้วถูกติดกาวด้วยเส้นเลือดฝอยแก้วเพื่อเป็นตัวบ่งชี้การวางแนวเพื่อจัดแนวให้ตรงกับเส้นขีดที่ทำเครื่องหมายไว้ก่อนหน้านี้บนตัวยึดตัวอย่าง เพื่อจัดตำแหน่งตัวอย่างให้อยู่ในตำแหน่งเดียวกันกับการสัมผัสครั้งแรก พบต้นกำเนิดอีกครั้งตามตำแหน่งของลำตัวที่ประดิษฐ์ขึ้น และรหัสโครงสร้างได้รับการแก้ไขด้วยมุมเฉพาะตามการเปลี่ยนการวางแนวของลำตัว เพื่อเพิ่มความแม่นยำในการประดิษฐ์ให้สูงสุด จากนั้นจึงดำเนินการสัมผัสครั้งที่สองเพื่อสร้างครีบและส่วนประกอบที่ยืดหยุ่น
ลักษณะเฉพาะของวัสดุ
กล้องจุลทรรศน์สเปกตรัมเลเซอร์คอนโฟคอล (Zeiss LSM 980) ถูกนำมาใช้เพื่อให้ได้รูปทรงเรขาคณิต 3 มิติของไมโครฟอร์ซมิเตอร์ที่เลเซอร์กระตุ้นที่ 488 นาโนเมตร และการตรวจจับการปล่อยก๊าซที่ 580 นาโนเมตร ImageJ ใช้เพื่อสร้างแบบจำลอง 3 มิติของโครงสร้างและวัดขนาด
คุณสมบัติความยืดหยุ่นของคานยื่นได้รับการสอบเทียบโดยระบบจับแสง (Lumicks C-Trap) ไมโครบีดโพลีสไตรีนขนาด 5 ไมโครเมตรถูกนำมาใช้เพื่อปรับเทียบกำลังเลเซอร์ของตัวดักแสง ทำให้แรงดักจับคงที่ของกำลังเลเซอร์บางตัว จากนั้นจึงดึงไมโครบีดเพื่อทำให้ไมโครฟอร์ซมิเตอร์เปลี่ยนรูปให้ช้าที่สุดเท่าที่จะทำได้ เพื่อไม่ให้ละเลยแรงดึง เส้นโค้งการดัดงอของไมโครฟอร์ซมิเตอร์เทียบกับแรงที่ใช้นั้นสามารถกำหนดได้โดยการบันทึกตำแหน่งของไมโครบีดและมุมโก่งของคานยื่นออกมา (ดูรายละเอียดในข้อความเสริม 1.2). การวัดแต่ละกลุ่มทำซ้ำกับตัวอย่างสามตัวอย่าง วิเคราะห์รูปภาพและวิดีโอด้วย ImageJ และข้อมูลถูกติดตั้งด้วย OriginPro ความหนืดของ SP-TALP มีค่าเท่ากับ 1 mPa·s การระบุลักษณะทางกลของชิ้นส่วนแข็งที่สร้างขึ้นที่ 25 mW ทำได้โดยใช้ AFM ดังแสดงในรูปที่ XNUMX เพิ่มเติม 3 (ดูรายละเอียดในข้อความเสริม 1.2).
คุณสมบัติการทำให้เป็นแม่เหล็กของวัสดุมีลักษณะเฉพาะคือแมกนีโตมิเตอร์อุปกรณ์รบกวนควอนตัมตัวนำยิ่งยวด (SQUID, การออกแบบควอนตัม) ที่อุณหภูมิห้องโดยมีสนามแม่เหล็กสูงถึง 100 mT ตัวอย่างถูกเตรียมเป็นอาร์เรย์ของของแข็งสี่เหลี่ยม 8,848 ชิ้น ที่มีความยาว 15 ไมโครเมตร และพื้นที่หน้าตัด 16 ไมโครเมตร2. ความไวต่อปริมาตรคำนวณเป็น 0.1220 โดยการปรับสนามแม่เหล็กให้เหมาะสมกับสนามที่ใช้โดยใช้ซอฟต์แวร์ OriginPro
การวัดแรงขับเคลื่อนด้วยไมโครฟอร์ซมิเตอร์
ท่อไมโครสเปิร์ม – มอเตอร์, ไมโครเจ็ทแบบท่อ และไมโครเฮลิซล้วนถูกประดิษฐ์ขึ้นโดย TPL โดยใช้ IP-DIP เป็นตัวต้านทานแสง หลังจากการสัมผัส ตัวอย่างถูกทำให้แห้งในเครื่องอบแห้งแบบจุดวิกฤตหลังจากการพัฒนา 20 นาทีใน mr-Dev 600 (ไมโครต้านทาน) และล้างสามครั้งด้วยไอโซโพรพานอล ชั้นโลหะของ Fe (10 นาโนเมตร) / Ti (5 นาโนเมตร) ถูกเคลือบบนท่อไมโครสเปิร์ม - มอเตอร์และไมโครเฮลิซโดยการสปัตเตอร์ ชั้นของ Fe (10 นาโนเมตร)/Ti (5 นาโนเมตร)/Pt (10 นาโนเมตร) ถูกเคลือบบนไมโครเจ็ทแบบท่อโดยการสะสมของลำแสงอิเล็กทรอนิกส์ สเปิร์มของวัวถูกเตรียมตามระเบียบการที่รายงานก่อนหน้านี้2. ตัวอย่างทั้งหมดได้รับการบำบัดในสารละลาย PF127 (1%) เป็นเวลา 0.5 ชั่วโมงก่อนใช้งาน การวัดสเปิร์ม - มอเตอร์ดำเนินการในห้องไมโครมิเตอร์มิเตอร์ด้วย SP-TALP ขนาด 1 มล. ที่บรรจุประมาณ 103 ไมโครทูบ และ 104 อสุจิ ตัวอสุจิ-มอเตอร์เกิดขึ้นเมื่อตัวอสุจิถูกจำกัดอยู่ในท่อขนาดเล็กโดยการว่ายน้ำแบบสุ่ม จากนั้นสเปิร์ม-มอเตอร์จะถูกนำโดยสนามแม่เหล็กภายนอกที่ประมาณ 2 mT ไปยังแถบการกระทำของไมโครฟอร์ซมิเตอร์ สนามแม่เหล็กถูกปรับตั้งฉากกับแถบแอคชั่น เพื่อหลีกเลี่ยงอิทธิพลของแรงบิดแม่เหล็กที่มีต่อการเสียรูปของคานยื่น การวัดไมโครเจ็ตดำเนินการใน SP-TALP ที่มี H2O2 และโซเดียมโดเดซิลซัลเฟต 0.1% มีการเติมไมโครเจ็ตประมาณ 20 ลำและควบคุมในลักษณะเดียวกับมอเตอร์สเปิร์ม การวัดไมโครเฮลิซทำได้โดยการใช้สนามแม่เหล็กหมุน 10 mT ที่ 40 Hz สำหรับการกระตุ้นแม่เหล็ก แรงขับเคลื่อนซึ่งก็คือแรงยืดหยุ่นเมื่อความเร็วของสเปิร์ม-มอเตอร์เป็นศูนย์ คำนวณโดยการประมาณค่าเชิงเส้นในเส้นโค้งการสอบเทียบของไมโครฟอร์ซมิเตอร์ ยกเว้นแรงขับเคลื่อนของไมโครเจ็ท ซึ่งได้มาจากกราฟจำลองการวิเคราะห์องค์ประกอบไฟไนต์ ของไมโครฟอร์ซมิเตอร์แบบสั้น การวัดทั้งหมดเสร็จสิ้นที่ 37 °C เว้นแต่จะระบุไว้เป็นอย่างอื่น วิดีโอและข้อมูลได้รับการวิเคราะห์โดย ImageJ และ OriginPro แรงยืดหยุ่นถูกคำนวณโดยการประมาณค่าในกราฟการปรับเทียบไมโครฟอร์ซมิเตอร์ในรูปที่ 3ค,ง.
การควบคุมแม่เหล็กของไมโครกริปเปอร์
การกระตุ้นด้วยแม่เหล็กดำเนินการโดยระบบแม่เหล็กไฟฟ้า (Magnebotix MFG 100-i) สนามแม่เหล็กตามลำดับเวลาถูกสร้างขึ้นโดยการออกแบบ Bx, By และ Bz พร้อมฟังก์ชั่นแบบแยกส่วน หลังจากกระบวนการเปลี่ยนตัวกลาง ตัวอย่างไมโครหุ่นยนต์และไมโครกริปเปอร์จะถูกบำบัดในอ่างอัลตราโซนิกเป็นเวลา 5 นาที จากนั้นใช้ปิเปตขนาด 100 ไมโครลิตรเพื่อเป่าตัวอย่างด้วยตัวกลางเบาๆ เพื่อแยกโครงสร้างจุลภาคออกจากซับสเตรตโดยปราศจากไซลาไนเซชัน ในการทดลองไมโครโรบอต ตัวอย่างจะถูกกระจายโดยตรงใน SP-TALP และดำเนินการในสนามแม่เหล็ก ในการทดลองไมโครกริปเปอร์ มีการเติมสารละลายตัวอย่างด้วยวัตถุขนาดเล็กที่เตรียมไว้ล่วงหน้า (ไมโครบีดและไมโครคลอต) ตัวอย่างไมโครบีดได้มาจากการกระจายไมโครบีดโพลีสไตรีนขนาด 5 ไมโครเมตรโดยตรงที่ประมาณ 103 ml-1 ดังแสดงในรูป 4c,ฉ. ไมโครโคลต์ที่ใช้โปรตีนถูกสังเคราะห์ด้วยซีรั่มอัลบูมินของวัวโดยใช้วิธีไมโครอิมัลชันตามที่รายงานไว้ก่อนหน้านี้2. สารละลายเลียนแบบของเหลวในท่อนำไข่ถูกเตรียมโดยใช้สื่อเซลล์ HeLa ซึ่งมีเมทิลเซลลูโลส 0.4% เพื่อเลียนแบบคุณสมบัติยืดหยุ่นหนืดของของเหลว สนามแม่เหล็กที่กำลังหมุนถูกนำมาใช้เพื่อการเคลื่อนที่ของไมโครกริปเปอร์ในลักษณะกลิ้ง และใช้สนามแม่เหล็กสม่ำเสมอเพื่อเปิดบุ้งกี๋ของมือจับ วิดีโอและข้อมูลได้รับการจัดการด้วย ImageJ และ OriginPro
หลังจากจัดการเซลล์ HeLa แล้ว เซลล์เป้าหมายจะถูกย้อมด้วยชุดการย้อมสีที่มีชีวิต/ตายที่ประกอบด้วยฟลูออเรสซีน ไดอะซิเตต และโพรพิเดียม ไอโอไดด์ หลังจากระยะฟักตัว 10 นาที ภาพเรืองแสงแบบหลายช่องสัญญาณจะถูกจับภาพโดยใช้การกระตุ้นที่ความยาวคลื่น 470 นาโนเมตรสำหรับเซลล์ที่มีชีวิต (ความยาวคลื่นที่ปล่อยออกมา 530 นาโนเมตร) และ 540 นาโนเมตรสำหรับเซลล์ที่ตายแล้ว (ความยาวคลื่นที่ปล่อยออกมา 618 นาโนเมตร) ต่อจากนั้น เซลล์ HeLa เป้าหมายถูกเพาะเลี้ยงภายในถังของไมโครกริปเปอร์เป็นเวลาเพิ่มเติมอีก 4 ชั่วโมง จากนั้นจึงดำเนินการจัดการครั้งที่สองเพื่อเคลื่อนย้ายเซลล์ HeLa ไปตามแนววิถีสี่เหลี่ยม หลังจากการยักย้ายนี้ ภาพเรืองแสงก็กลับมาอีกครั้ง การมีอยู่ของแสงเรืองแสงสีเขียวของเซลล์เป้าหมายหลังการจัดการบ่งชี้ว่าไมโครกริปเปอร์ไม่มีผลกระทบเชิงลบต่อการมีชีวิตของเซลล์ในระหว่างการควบคุม ตรงกันข้ามกับการเรืองแสงสีแดงที่พบในเซลล์ที่ตายแล้วแบบสุ่ม การควบคุมการวางแนวของเซลล์ดังแสดงในรูป 4g ดำเนินการโดยการเปลี่ยนทิศทางของเวกเตอร์สนามแม่เหล็กที่ใช้หลังจากที่ไมโครกริปเปอร์จับกลุ่มเซลล์แล้ว ใช้สนามแม่เหล็กสม่ำเสมอขนาด 6 mT +x ทิศทางในการจับและกำหนดทิศทางเริ่มต้นของกระจุกเซลล์ สำหรับการเปลี่ยนการวางแนวเซลล์ใน x-y (อ้าปากค้าง) หรือ x-z (พิทช์) ระนาบ เวกเตอร์ของสนามแม่เหล็กถูกหมุนไปตาม z or y แกนตามระดับใดก็ได้ตามความต้องการ สำหรับการเปลี่ยนการวางแนวเซลล์ใน y-z ระนาบ (ม้วน) ใช้สนามแม่เหล็กหมุนอีกอันที่ 2 mT และ 20 Hz การวางแนวของกลุ่มเซลล์ใน y-z ระนาบถูกเปลี่ยนโดยการเปลี่ยนแกนหมุนของสนามแม่เหล็กที่กำลังหมุน ในขณะที่สนามแม่เหล็กสม่ำเสมอที่ 6 mT ถูกเก็บไว้ตามแนว +x แกน.
การควบคุมแม่เหล็กของไมโครเพนกวินและไมโครเทอร์เทิล
ไมโครโรบอตที่มีการเคลื่อนที่แบบสมมาตรเวลาไม่สามารถบรรลุการเคลื่อนที่สุทธิที่เลขเรย์โนลด์สต่ำได้54. กลยุทธ์ที่มีประสิทธิภาพในการทำลายความสมมาตรของเวลาคือทำให้การวางแนวของไมโครหุ่นยนต์ในระหว่างการแปลงร่างแตกต่างจากการวางแนวระหว่างการฟื้นตัว เพื่อเป็นการสาธิต เราใช้กลยุทธ์การเปลี่ยนทิศทางเพื่อควบคุมไมโครเพนกวิน รูปที่ขยายข้อมูล 6a แสดงให้เห็นลำดับของสนามแม่เหล็กด้วยระยะเวลาวงจร 9 วินาที ดังแสดงในรูป 6a: 0–1 วินาที จะมีการใช้สนามแม่เหล็กสม่ำเสมอขนาด 16 mT ตามแนว x แกน (ระยะที่ 1–2); 1–1.5 วินาที สนามแม่เหล็กหมุน 16 mT ตามแนว y แกน; 1.5–2.5 วินาที สนามแม่เหล็กสม่ำเสมอ 2 mT ตามแนว z แกน (ระยะที่ 2–3); 2.5–4.5 วินาที สนามแม่เหล็กหมุน 2 mT ตามแนว y แกน; 4.5–5.5 วินาที สนามแม่เหล็กสม่ำเสมอ 16 mT ตามแนว x แกน (ระยะที่ 3–4); 5.5–6 วินาที สนามแม่เหล็กหมุน 16 mT ตามแนว y แกน; 6–7 วินาที สนามแม่เหล็กสม่ำเสมอ 2 mT ตามแนว z แกน (ระยะที่ 4–1); 7–9 วินาที สนามแม่เหล็กหมุน 2 mT ตามแนว y แกน. หลังจากผ่านไป 9 วินาที ไมโครเพนกวินจะกลับสู่ทิศทางเดิมและมีการกระจัดสุทธิตามแนว x แกน. รูปที่ขยายข้อมูล 6b แสดงลำดับสนามแม่เหล็กด้วยระยะเวลาวงจร 5.5 วินาทีของไมโครเพนกวินในลักษณะการว่ายน้ำที่มีประสิทธิภาพมากขึ้น ในกรณีนี้ สนามแม่เหล็กสม่ำเสมอและการหมุนถูกผสมกัน ทำให้สามารถหมุนไมโครเพนกวินและเปิดและปิดฟลิปเปอร์ได้พร้อมกัน
ข้อเสียประการหนึ่งของกลยุทธ์การควบคุมการเปลี่ยนทิศทางคือการหมุนพร้อมกันของหุ่นยนต์ทั้งหมด แม้ว่าจะมีการใช้งานแบบสากลกับไมโครโรบอตแบบยืดหยุ่นเพื่อสร้างการกระจัดสุทธิก็ตาม การหมุนนี้สามารถหลีกเลี่ยงการใช้ชุดพิโคสปริงที่ขับเคลื่อนชิ้นส่วนต่างๆ ที่เคลื่อนไหวได้ของไมโครโรบอตด้วยแรงแม่เหล็กที่ไม่เป็นเนื้อเดียวกัน เช่น ไมโครเทอร์เทิล รูปที่ขยายข้อมูล 7a แสดงผลการจำลองการวิเคราะห์องค์ประกอบไฟไนต์ ซึ่งช่วยค้นหาทิศทางที่มีประสิทธิภาพสูงสุดของสนามแม่เหล็ก ลำดับสนามแม่เหล็กของกลยุทธ์การควบคุมขั้นสุดท้ายแสดงไว้ในรูปที่ขยายข้อมูล 7b. จำเป็นต้องใช้สนามแม่เหล็กที่สม่ำเสมอเท่านั้นเพื่อสร้างการกระจัดสุทธิสำหรับเต่าขนาดเล็ก เนื่องจากการทำงานที่ประสานกันและการบัฟเฟอร์ของพิโคสปริงคู่ซ้ายและขวาที่ควบคุมฟลิปเปอร์ที่แตกต่างกัน จากนั้นเต่าไมโครจะถูกควบคุมให้เคลื่อนที่ในสองมิติเท่านั้น x-y ระนาบที่ไม่มีการหมุนหรือการกระจัดใน z แกน: 0–1 วินาที, 2 mT ตามแนว 15° (ทิศทางทวนเข็มนาฬิกาเป็นค่าบวก) ทิศทางจาก +y ทิศทาง (แกนสมมาตรของเต่าไมโคร); 1–1.5 วินาที, 2 mT ตามแนว −75° จาก +y; 1.5–2.5 วินาที, 16 mT ตามแนว −105° +y; 2.5–3 วินาที 2 mT ตลอด +y. การทดลองการเคลื่อนที่ของไมโครโรบอททั้งหมดถูกดำเนินการใน PBS ที่อุณหภูมิ 25 °C เต่าไมโครมีความเข้มข้นสองเท่าของ MNP ถูกควบคุมด้วยช่วงเวลาการหมุนเวียนที่ 0.8 วินาที (รูปที่ข้อมูลขยาย 8) โดยมีส่วนเฟสเทียบเคียงที่ 0–0.25 วินาที, 0.25–0.4 วินาที, 0.4–0.7 วินาที และ 0.7–0.8 วินาที
การประเมินความเข้ากันได้ทางชีวภาพ
เซลล์ HeLa ถูกนำมาใช้เพื่อประเมินความเข้ากันได้ทางชีวภาพของเครื่องจักรขนาดเล็ก โดยเฉพาะอาร์เรย์ไมโครกริปเปอร์ โดยสรุป ตัวอย่างของไมโครกริปเปอร์ที่ประดิษฐ์ขึ้น 7 ตัวอย่างถูกวางไว้ในหลุมเพาะเลี้ยงเซลล์ของเพลต 6 หลุมและเติมด้วยอาหารเลี้ยงเชื้อ 3 มิลลิลิตร หลุมของกลุ่มควบคุมถูกเติมด้วยสื่อเซลล์เท่านั้น แต่ละบ่อเพาะประมาณ 10 บ่อ5 เซลล์เฮลา หลังจากการฟักตัว 48 ชั่วโมง 1 หลุมจากกลุ่มไมโครกริปเปอร์และ 1 หลุมจากกลุ่มควบคุมถูกย้อมโดยตรงโดยใช้ชุดการย้อมสีที่มีชีวิต/ตายที่มีฟลูออเรสซีน ไดอะซิเตต (5 มก. มล.-1 ในอะซิโตน) และโพรพิเดียมไอโอไดด์ (1 มก. มล-1 ในพีบีเอส) ภาพเรืองแสงแบบหลายช่องสัญญาณถ่ายโดยใช้กล้องจุลทรรศน์ฟลูออเรสเซนซ์ (Cell Observer, Carl Zeiss Microscopy) ภายใต้การกระตุ้นที่ความยาวคลื่น 470 นาโนเมตรสำหรับเซลล์ที่มีชีวิต (ความยาวคลื่นการปล่อย 530 นาโนเมตร) และ 540 นาโนเมตรสำหรับเซลล์ที่ตายแล้ว (ความยาวคลื่นการปล่อย 618 นาโนเมตร) หลังจากการฟักตัวเป็นเวลา 72 ชั่วโมง เซลล์ที่เหลืออีก 12 หลุมจะถูกทริปซิไนซ์ ย้อม และนับภายใต้กล้องจุลทรรศน์ฟลูออเรสเซนซ์ ความมีชีวิตของเซลล์คำนวณเป็นอัตราส่วนของจำนวนเซลล์ที่มีชีวิต (สีเขียว) ต่อจำนวนเซลล์ทั้งหมด
สถิติและการทำซ้ำ
ไม่มีการใช้วิธีการทางสถิติเพื่อกำหนดขนาดตัวอย่างล่วงหน้า ไม่มีข้อมูลใดถูกแยกออกจากการวิเคราะห์ เซลล์และตัวอย่างที่ถูกประดิษฐ์ได้รับการสุ่มให้กับกลุ่มที่เกี่ยวข้องก่อนการดำเนินการ ผู้วิจัยไม่ได้มองข้ามการจัดสรรในระหว่างการทดลองและการประเมินผลลัพธ์
สรุปการรายงาน
ข้อมูลเพิ่มเติมเกี่ยวกับการออกแบบการวิจัยมีอยู่ใน สรุปการรายงานผลงาน Nature เชื่อมโยงกับบทความนี้
- เนื้อหาที่ขับเคลื่อนด้วย SEO และการเผยแพร่ประชาสัมพันธ์ รับการขยายวันนี้
- PlatoData.Network Vertical Generative Ai เพิ่มพลังให้กับตัวเอง เข้าถึงได้ที่นี่.
- เพลโตไอสตรีม. Web3 อัจฉริยะ ขยายความรู้ เข้าถึงได้ที่นี่.
- เพลโตESG. คาร์บอน, คลีนเทค, พลังงาน, สิ่งแวดล้อม แสงอาทิตย์, การจัดการของเสีย. เข้าถึงได้ที่นี่.
- เพลโตสุขภาพ เทคโนโลยีชีวภาพและข่าวกรองการทดลองทางคลินิก เข้าถึงได้ที่นี่.
- ที่มา: https://www.nature.com/articles/s41565-023-01567-0
- :เป็น
- :ไม่
- $ ขึ้น
- 1
- 10
- 100
- 12
- ลด 15%
- 16
- 20
- 200
- 2010
- 2019
- 2020
- 22
- 23
- 24
- 25
- 28
- 30
- ลด 35%
- 3d
- 40
- 49
- 51
- 54
- 7
- 70
- 72
- 8
- 80
- 9
- 98
- a
- เกี่ยวกับเรา
- ข้างบน
- ตาม
- ความถูกต้อง
- บรรลุ
- ที่ได้มา
- การกระทำ
- ที่เพิ่ม
- เพิ่มเติม
- ปรับ
- ตรงข้าม
- หลังจาก
- อีกครั้ง
- AL
- จัดแนว
- ชิด
- สอดคล้อง
- ทั้งหมด
- การจัดสรร
- ตาม
- เสมอ
- am
- an
- วิเคราะห์
- การวิเคราะห์
- วิเคราะห์
- สมอ
- และ
- อื่น
- ใด
- ประยุกต์
- การประยุกต์ใช้
- ประมาณ
- เป็น
- AREA
- รอบ
- แถว
- บทความ
- AS
- ประเมินผล
- การประเมินผล
- ที่ได้รับมอบหมาย
- At
- แนบ
- ใช้ได้
- หลีกเลี่ยง
- หลีกเลี่ยง
- แกน
- แกน
- สมดุลย์
- บาร์
- ตาม
- BE
- กลายเป็น
- ก่อน
- ระหว่าง
- ระเบิด
- ร่างกาย
- ทำลาย
- สั้น
- by
- คำนวณ
- CAN
- ไม่ได้
- จับ
- ถูกจับกุม
- คาร์ล
- กรณี
- เซลล์
- เซลล์
- บาง
- ห้อง
- เปลี่ยนแปลง
- การเปลี่ยนแปลง
- เปลี่ยนแปลง
- ลักษณะ
- สารเคมี
- คลาสสิก
- คลิก
- ปิด
- Cluster
- รหัส
- ที่เก็บรวบรวม
- เชิงพาณิชย์
- เทียบเคียง
- ซับซ้อน
- ส่วนประกอบ
- ส่วนประกอบ
- สมาธิ
- ถูก จำกัด
- มี
- อย่างต่อเนื่อง
- ตรงกันข้าม
- ควบคุม
- การควบคุม
- การควบคุม
- ประสานงาน
- การประสานงาน
- การแก้ไข
- ได้
- นับ
- โควาเลนท์
- วิกฤติ
- วัฒนธรรม
- เส้นโค้ง
- วงจร
- ข้อมูล
- ตาย
- กำหนด
- องศา
- ความต้องการ
- ออกแบบ
- การออกแบบ
- แม้จะมี
- รายละเอียด
- การตรวจพบ
- แน่นอน
- พัฒนา
- พัฒนาการ
- เครื่อง
- ต่าง
- มิติ
- โดยตรง
- ทิศทาง
- โดยตรง
- ข้อเสียเปรียบ
- แยกย้ายกันไป
- การกำจัด
- ทำ
- สอง
- การขับขี่
- ปรับตัวลดลง
- เครื่องเป่า
- ระยะเวลา
- ในระหว่าง
- e
- E&T
- แต่ละ
- ง่าย
- ed
- ที่มีประสิทธิภาพ
- อย่างมีประสิทธิภาพ
- ธาตุ
- การส่งออก
- การเปิดใช้งาน
- เสริม
- สิ่งแวดล้อม
- เอนไซม์
- อีเธอร์ (ETH)
- ตัวอย่าง
- ยกเว้น
- การยกเว้น
- การทดลอง
- การทดลอง
- การทดลอง
- การเปิดรับ
- ขยาย
- ภายนอก
- Fe
- สนาม
- สาขา
- มะเดื่อ
- รูป
- ที่เต็มไป
- สุดท้าย
- ในที่สุด
- ชื่อจริง
- เหมาะสม
- ของเหลว
- FLUX
- ดังต่อไปนี้
- สำหรับ
- บังคับ
- กองกำลัง
- ที่เกิดขึ้น
- พบ
- ราคาเริ่มต้นที่
- อย่างเต็มที่
- ฟังก์ชัน
- ฟังก์ชั่น
- ต่อไป
- นอกจากนี้
- กําไร
- สร้าง
- สร้าง
- การสร้าง
- เรขาคณิต
- กำหนด
- ให้
- กระจก
- ค่อยๆ
- สีเขียว
- บัญชีกลุ่ม
- กลุ่ม
- ให้คำแนะนำ
- แนะนำ
- มี
- ครึ่ง
- การจัดการ
- ช่วย
- เจ้าของ
- HTTPS
- อีอีอี
- ภาพ
- ส่งผลกระทบ
- การดำเนินการ
- การดำเนินการ
- in
- ฟักไข่
- แสดงว่า
- ตัวบ่งชี้
- มีอิทธิพล
- ข้อมูล
- แรกเริ่ม
- ภายใน
- แบบบูรณาการ
- การรบกวน
- เข้าไป
- นักวิจัย
- ITS
- เก็บไว้
- ชุด
- เลเซอร์
- ชั้น
- ซ้าย
- ความยาว
- ชีวิต
- เบา
- เส้น
- LINK
- ที่เชื่อมโยง
- สด
- โหลด
- โหลด
- ในประเทศ
- ต่ำ
- สนามแม่เหล็ก
- ทำ
- การจัดการกับ
- การจัดการ
- ลักษณะ
- โดดเด่น
- วัสดุ
- วัสดุ
- วัด
- วัด
- การวัด
- วัด
- เชิงกล
- กลศาสตร์
- ภาพบรรยากาศ
- กลาง
- โลหะ
- วิธี
- ไมโคร
- กล้องจุลทรรศน์
- กล้องจุลทรรศน์
- นาที
- ผสม
- การผสม
- สารผสม
- ML
- แบบ
- การสร้างแบบจำลอง
- การแก้ไข
- โมดูล
- ข้อมูลเพิ่มเติม
- มีประสิทธิภาพมากขึ้น
- มากที่สุด
- การเคลื่อนไหว
- ย้าย
- การย้าย
- MT
- หลาย
- นาโนเทคโนโลยี
- ธรรมชาติ
- จำเป็น
- สุทธิ
- ไม่
- ยวด
- จำนวน
- ตั้งข้อสังเกต
- ได้รับ
- ที่ได้รับ
- of
- on
- ออนบอร์ด
- ครั้งเดียว
- เพียง
- ไปยัง
- เปิด
- การเปิด
- การดำเนินการ
- การดำเนินการ
- การดำเนินการ
- ออปติคอล
- or
- ที่มา
- เป็นต้นฉบับ
- อื่นๆ
- มิฉะนั้น
- ออก
- ผล
- คู่
- Parallel
- พารามิเตอร์
- ส่วน
- พีบีเอส
- ดำเนินการ
- ระยะเวลา
- ระยะ
- ขั้นตอน
- ขว้าง
- วางไว้
- เครื่องบิน
- Planes
- เพลโต
- เพลโตดาต้าอินเทลลิเจนซ์
- เพลโตดาต้า
- จุด
- ผลงาน
- ตำแหน่ง
- ตำแหน่ง
- บวก
- เป็นไปได้
- อำนาจ
- อำนาจ
- คาดการณ์
- เตรียม
- การมี
- นำเสนอ
- ก่อนหน้านี้
- กระบวนการ
- มืออาชีพ
- เงื้อม
- คุณสมบัติ
- คุณสมบัติ
- แรงขับ
- ซื้อ
- ควอนตัม
- คะแนน
- อัตราส่วน
- การบันทึก
- กู้คืน
- การฟื้นตัว
- สีแดง
- การอ้างอิง
- ได้รับการยกย่อง
- ปล่อย
- ที่เหลืออยู่
- จากระยะไกล
- เอาออก
- ซ้ำแล้วซ้ำอีก
- แทนที่
- รายงาน
- การรายงาน
- แสดง
- การวิจัย
- เคารพ
- ว่า
- ผลสอบ
- ขวา
- เข้มงวด
- หุ่นยนต์
- ม้วน
- กลิ้ง
- ห้อง
- s
- เดียวกัน
- SCI
- ที่สอง
- ส่วน
- เห็น
- ดูรายละเอียด
- แสวงหา
- ส่วน
- เซ็นเซอร์
- ลำดับ
- เซรุ่ม
- ชุด
- รูปร่าง
- รูปร่าง
- สั้น
- น่า
- แสดง
- แสดงให้เห็นว่า
- ที่เรียบง่าย
- ลดความซับซ้อน
- ง่ายดาย
- จำลอง
- การจำลอง
- พร้อมกัน
- ขนาด
- ช้า
- เล็ก
- So
- โซเดียม
- อ่อน
- ซอฟต์แวร์
- ทางออก
- พิเศษ
- โดยเฉพาะ
- เฉพาะ
- ที่ระบุไว้
- สเปกตรัม
- ความเร็ว
- สเปิร์ม
- ทางสถิติ
- กลยุทธ์
- โครงสร้าง
- โครงสร้าง
- ต่อจากนั้น
- ความอ่อนไหว
- ว่ายน้ำ
- ระบบ
- นำ
- เป้า
- สถานีปลายทาง
- ข้อความ
- ที่
- พื้นที่
- แล้วก็
- ล้อยางขัดเหล่านี้ติดตั้งบนแกน XNUMX (มม.) ผลิตภัณฑ์นี้ถูกผลิตในหลายรูปทรง และหลากหลายเบอร์ความแน่นหนาของปริมาณอนุภาคขัดของมัน จะทำให้ท่านได้รับประสิทธิภาพสูงในการขัดและการใช้งานที่ยาวนาน
- theta
- นี้
- สาม
- เห็บ
- เวลา
- ครั้ง
- ไปยัง
- รวม
- ไปทาง
- เส้นโคจร
- ไขมันทรานส์
- การขนส่ง
- วางกับดัก
- ได้รับการรักษา
- สองครั้ง
- สอง
- ล้ำเสียง
- ภายใต้
- สากล
- ใช้
- มือสอง
- การใช้
- การตรวจสอบ
- การทำงานได้
- วิดีโอ
- ปริมาณ
- คือ
- การซัก
- น้ำดื่ม
- ทาง..
- we
- ดี
- เวลส์
- คือ
- เมื่อ
- ที่
- ในขณะที่
- ทั้งหมด
- กับ
- ไม่มี
- การเขียน
- ลมทะเล
- เป็นศูนย์