Magnetic-elastic photoresist preparation
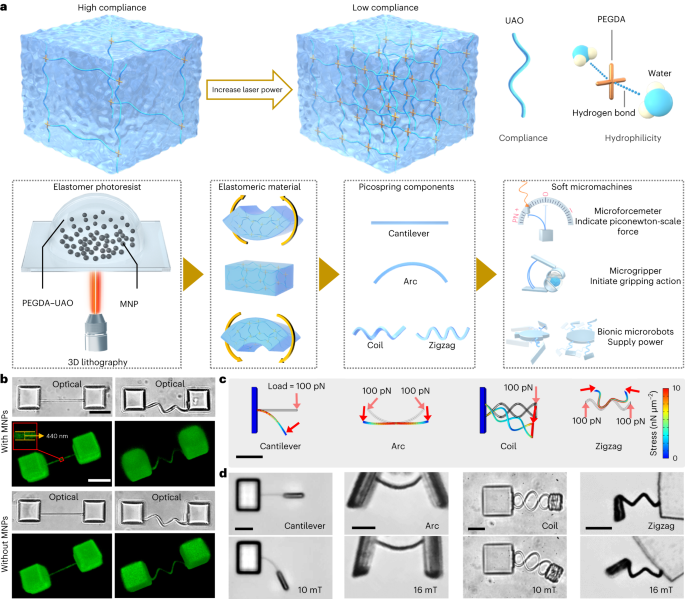
All chemicals were purchased from Sigma-Aldrich unless otherwise specified. The elastic photoresist consisted of urethane acrylate oligomer 70 wt%, poly(ethylene glycol) diacrylate 28.40 wt% as the crosslinker, 1-(4-(2-(dimethylamino)ethoxy)phenyl)-2-phenyl-1-butanone 1.5 wt% as the photoinitiator, and a complex of 2,2,6,6-tetramethylpiperidine-1-oxyl 0.05 wt% and methyl methacrylate 0.05 wt% as the quencher. The mixture was bubbled with nitrogen for 30 min and vacuumed for 30 min to degas. MNPs were prepared based on a classic coprecipitation method. Briefly, 5.38 g FeCl3· 6H2O ve 1.98 g FeCl2· 4H2O, 200 ml H içinde çözüldü2O. Daha sonra karışıma 7 ml %25 amonyum hidroksit damlatıldı ve 3 saat boyunca sürekli karıştırıldı. Toplanan parçacıklar daha sonra üç kez su ile yıkandı ve 3 °C'de 1 saat boyunca ağırlıkça %0.5 ve ağırlıkça %80 konsantrasyonlarda etanol içerisinde 1-(trimetoksisilil)propil metakrilat ile daha da değiştirildi (ref. 20). MNP'ler etanol ile üç kez yıkandıktan sonra toplandı. Manyetik-elastik fotorezist, MNP'lerin çift konsantrasyonlu MNP içeren özel mikro kaplumbağa için %5 veya %10 konsantrasyonda elastik fotoreziste karıştırılmasıyla hazırlandı. Son olarak, manyetik-elastik fotorezist N ile kabarcıklandı.2 for 30 min and vacuumed for 30 min. Prepared photoresist should be always kept from light at 4 °C before use.
Sayısal analiz
Mikroyapıları malzeme özelliklerine göre verimli bir şekilde tasarlamak için, mikro yapıların şekil değiştirmesini imalattan önce tahmin etmek amacıyla simülasyonlar yapıldı. Şekil 2'de sunulan sonuçlar için. 1d ve 6dve Genişletilmiş Veri Şek. 3 ve 7ticari sonlu elemanlar analiz yazılımı Comsol'un kullanıcı tanımlı bir çoklu fizik modülünü kullandık. Tüm katılar ve sıvılar sıkıştırılamaz olarak kabul edildi. Gencin modülü E Konsol piko yayının mekanik karakterizasyon sonuçlarına göre mikro kuvvet ölçerler için 0.422 MPa ve diğer elastik bileşenler için 1.525 Mpa olarak ayarlandı. Malzemenin neredeyse sıkıştırılamaz olduğu varsayılarak tüm malzemeler için Poisson oranı 0.49 olarak belirlendi. Tüm simülasyonlarda sperm ortamı (SP-TALP), 10 yoğunluğunda bir Newton sıvısı olarak ayarlandı.3 kg m-3 ve 1 mPa·s viskozite. Sonlu elemanlar analizi sırasında uygulanan yük, yerel koordinat sistemindeki manyetik torkun bir fonksiyonu olarak verildi. Manyetik tork Tm was calculated by using a simplified function applied to the soft magnetic material51:
$$begin{array}{l}{T}^{{mathrm{m}}}=frac{chi V}{mu }{B}^{2},sin left(theta -arctanleft(tantheta times frac{1+0.118chi }{1+0.432chi }right)right)sqrt{{left(frac{costheta }{1+0.118chi }right)}^{2}+{left(frac{sintheta }{1+0.432chi }right)}^{2}}end{array}$$
nerede θ akı yoğunluğuna sahip manyetik alandan gelen açıdır B segmentin kolay manyetik eksenine; χ, V ve μ Segmentin manyetik duyarlılığını ve toplu hacmini ve suyun manyetik geçirgenliğini temsil eder (Ek Metindeki ayrıntılara bakın) 2). Mekanik simülasyonun sınır yükleri, yerel koordinat sistemindeki elastik yayların kesitine paralel olarak uygulandı. Şekil 2'de gösterilen mikro kaplumbağanın yüzgeçlerine uygulanan manyetik torklar. 6d yüzgeçler iki boyutlu projeksiyon şeklinde dikdörtgen şekiller halinde basitleştirilerek yukarıdaki denkleme göre hesaplanmıştır.
Mikropenguen ayrıca MATLAB ile Runge-Kutta dördüncü dereceden yinelemeli yöntemle çözülen kinematik bir modelle analiz edildi. Genişletilmiş Veri Şekil 2'de gösterildiği gibi. 6d, mikropenguen yüzgeçleri ve gövdesi küboidler olarak basitleştirildi. Elastik bileşenler doğrusal yaylar olarak basitleştirildi. Elastik bileşenin bükülme sertliği, her manyetik alanda iki kanatçığın değişen açısının yarısı olarak ölçülen sapma açısına göre dengeli manyetik torkun ayarlanmasıyla elde edildi. Ek simülasyon parametreleri Ek Metinde bulunabilir 2. Simülasyon sonuçları daha sonra mikro yapıların tasarımına ve imalatına rehberlik etmek için kullanıldı ve ayrıca deneysel sonuçlarla doğrulandı.
Mikroyapı imalatı
Mikro yapılar, 3 boyutlu doğrudan lazer yazma sistemi (Photonic Professional GT, Nanoscribe) kullanılarak üretildi. Fabrikasyon sırasında aksi belirtilmedikçe lazer gücü tüm sert parçalar için 25.0 mW, kuvvete duyarlı piko yaylar için 5.5 mW ve diğer tüm elastik bileşenler için 6.0 mW olarak ayarlandı. Maruz kaldıktan sonra numune, polimerize olmayan tüm bileşenlerin uzaklaştırılması için 24 saat boyunca aseton içerisinde geliştirildi. Genişletilmiş Veri Şekil XNUMX'de gösterildiği gibi. 1a, the environment was changed from acetone to water-based media with pluronic acid F127 (PF127) as a thickener gradually at a rate of 200 μl min-1 for 12 h. After that, the solution was gently replaced with SP-TALP by pipette. Structural integrality of the picospring-based microstructures was well kept after these operations (Extended Data Fig. 1b). Notably, in the microgripper experiment, SP-TALP was furthermore replaced by a cell media mimicking oviduct fluid (cell media containing 0.4% methylcellulose)52.
During the fabrication of the microoscillator, the coil-spring microoscillator and the microforcemeter, the glass substrate was silanized before use to avoid the detachment of the microstructures from the substrate. 3-(Trimethoxysilyl)propyl methacrylate was used to attach methacrylate terminal groups onto the substrate, forming a covalent linkage between the glass substrate and the magnetic-elastic photoresist53.
During the fabrication of the microturtle, the exposure was performed twice by using the photoresist with and without MNPs. First, the elastic photoresist without MNPs was used to fabricate the torso. After that, the photoresist was replaced with magnetic-elastic photoresist. The glass substrate was glued with a glass capillary as an aligning indicator to be aligned to the previously marked tick lines on the sample holder to align the sample to the same position as the first exposure. The origin was found again based on the position of the fabricated torso and the structure code was corrected with a specific angle based on the orientation change of the torso to maximally enhance the fabrication accuracy. Then the second exposure was performed to fabricate the flippers and elastic components.
Malzeme karakterizasyonu
A confocal laser spectrum microscope (Zeiss LSM 980) was used to obtain the 3D geometry of the microforcemeter at excitation laser of 488 nm and emission detection of 580 nm. ImageJ was used to generate the 3D model of the structure and measure the dimensions.
Konsolun elastik özelliği bir optik tuzak sistemi (Lumicks C-Trap) ile kalibre edildi. Optik tuzağın lazer gücünü kalibre etmek için beş mikrometrelik polistiren mikro boncuklar kullanıldı ve belirli lazer güçlerinin yakalama kuvveti sabitleri verildi. Mikro boncuklar daha sonra mikro kuvvet ölçeri olabildiğince yavaş bir şekilde deforme etmek için çekildi, böylece sürükleme kuvveti ihmal edilebilirdi. Uygulanan kuvvete göre mikro kuvvet ölçerin bükülme eğrisi daha sonra mikro boncukların konumları ve konsolun sapma açıları kaydedilerek belirlenebilir (Ek Metin'deki ayrıntılara bakın) 1.2). Each group of measurements was repeated on three samples. Images and videos were analyzed with ImageJ and data were fitted with OriginPro. The viscosity of SP-TALP was taken as 1 mPa s. The mechanical characterization of the rigid parts fabricated at 25 mW was done using an AFM, shown in Supplementary Fig. 3 (Ek Metindeki ayrıntılara bakınız) 1.2).
The magnetization property of the material was characterized by a superconducting quantum interference device magnetometer (SQUID, Quantum Design) at room temperature with magnetic fields up to 100 mT. The samples were prepared as an array of 8,848 rectangular solids with a length of 15 μm and sectional area of 16 μm2. OriginPro yazılımı kullanılarak mıknatıslanmanın uygulanan alana göre ayarlanmasıyla hacim duyarlılığı 0.1220 olarak hesaplandı.
Mikroforcemeter ile itme kuvveti ölçümü
Sperm motorlu mikrotüpler, tübüler mikrojetler ve mikrohelikslerin tümü, fotodirenç olarak IP-DIP kullanılarak TPL tarafından üretildi. Maruz kaldıktan sonra numuneler, mr-Dev 20'de (Micro Resist) 600 dakikalık geliştirmenin ardından kritik nokta kurutucusunda kurutuldu ve üç kez izopropanol ile yıkandı. Fe (10 nm)/Ti (5 nm) metal katmanları, sperm motor mikrotüpleri ve mikroheliksler üzerine püskürtme yoluyla kaplandı. Fe (10 nm)/Ti (5 nm)/Pt (10 nm) katmanları, e-ışını biriktirme yoluyla boru şeklindeki mikrojet üzerinde kaplandı. Sığır spermi daha önce bildirilen protokole göre hazırlandı2. Tüm numuneler kullanımdan önce 127 saat boyunca PF1 çözeltisi (%0.5) içerisinde işlendi. Sperm motorlarının ölçümü, yaklaşık 1 ml içeren 10 ml SP-TALP ile mikroforcemetre odasında gerçekleştirildi.3 mikrotüpler ve 104 sperm. Sperm motoru, bir spermin rastgele yüzerek bir mikrotüpte sıkıştırılmasıyla oluştu. Sperm motoru daha sonra yaklaşık 2 mT'lik harici manyetik alan tarafından mikroforcemetrenin hareket çubuğuna doğru yönlendirildi. Manyetik torkun konsol deformasyonu üzerindeki etkisini önlemek için manyetik alan, hareket çubuğuna dik olarak ayarlandı. Mikrojetlerin ölçümü %1 H içeren SP-TALP'de yapıldı.2O2 ve %0.1 sodyum dodesil sülfat. Yaklaşık 20 mikrojet eklendi ve sperm motorlarıyla aynı şekilde yönlendirildi. Mikrohelikslerin ölçümü, manyetik harekete geçirme için 10 Hz'de 40 mT'lik dönen bir manyetik alan uygulanarak gerçekleştirildi. İtki kuvveti, yani sperm-motor hızı sıfır olduğunda elastik kuvvet, sonlu elemanlar analizi simülasyon eğrisinden elde edilen mikrojetin itme kuvveti hariç, mikroforcemetrenin kalibrasyon eğrisinde doğrusal enterpolasyonla hesaplandı. kısa mikroforcemetre. Aksi belirtilmedikçe tüm ölçümler 37 °C'de yapıldı. Videolar ve veriler ImageJ ve OriginPro tarafından analiz edildi. Elastik kuvvetler, Şekil XNUMX'deki mikroforcemetre kalibrasyon eğrisindeki enterpolasyonla hesaplandı. 3c, d.
Magnetic control of the microgripper
The magnetic actuation was performed by an electromagnet system (Magnebotix MFG 100-i). The time-sequential magnetic fields were generated by designing Bx, By ve Bz with piecewise functions. After the media changing process, the microrobot and microgripper samples were treated in the ultrasonic bath for 5 min. Then a 100 μl pipette was used to gently blow the samples with media to fully detach the microstructures from the substrate without silanization. In the experiments of microrobots, the samples were then directly dispersed in SP-TALP and operated in the magnetic field. In the experiments of the microgripper, the sample solution was added with pre-prepared microobjects (microbeads and microclots). The microbead sample was obtained by directly dispersing 5 μm polystyrene microbeads at about 103 ml-1 as shown in Fig. 4c,f. The protein-based microclots were synthesized with bovine serum albumin by using a microemulsion method as reported previously2. Yumurta kanalı sıvısını taklit eden çözelti, sıvının viskoelastik özelliğini taklit etmek için %0.4 metilselüloz içeren HeLa hücre ortamına dayalı olarak hazırlandı. Mikro yakalayıcının yuvarlanarak hareket etmesi için dönen manyetik alanlar uygulandı ve yakalayıcı kovanın açılması için düzgün manyetik alanlar uygulandı. Videolar ve veriler ImageJ ve OriginPro ile işlendi.
HeLa hücreleri işlendikten sonra hedef hücre, floresein diasetat ve propidyum iyodür içeren canlı/ölü boyama kitiyle boyandı. 10 dakikalık bir inkübasyon periyodunun ardından, canlı hücreler için 470 nm dalga boyunda (emisyon dalga boyu 530 nm) ve ölü hücreler için 540 nm'de (emisyon dalga boyu 618 nm) uyarma kullanılarak çok kanallı floresans görüntüleri yakalandı. Daha sonra hedef HeLa hücresi, mikro yakalayıcının kovasında 4 saat daha kültürlendi. Daha sonra HeLa hücresini dikdörtgen bir yörünge boyunca taşımak için ikinci bir manipülasyon gerçekleştirildi. Bu manipülasyonun ardından floresans görüntüleri bir kez daha elde edildi. Manipülasyondan sonra hedef hücrenin yeşil floresansının varlığı, rastgele ölü hücrelerde gözlenen kırmızı floresansın aksine, mikro yakalayıcının manipülasyon sırasında hücrenin canlılığı üzerinde olumsuz bir etkisinin olmadığını gösterdi. Şekil XNUMX'de gösterilen hücre yöneliminin kontrolü. 4g Mikro yakalayıcı hücre kümesini kavradıktan sonra uygulanan manyetik alan vektörünün yönü değiştirilerek uygulandı. boyunca 6 mT'lik düzgün bir manyetik alan uygulandı. +x hücre kümesinin başlangıç yönünü kavramak ve tanımlamak için yön. Hücre yönünü değiştirmek için x-y (yaw) veya x-z (eğim) düzlemleri, manyetik alan vektörleri basitçe z or y axes by any degree on demand. For changing the cell orientation in the y-z düzlem (rulo), 2 mT ve 20 Hz'de başka bir dönen manyetik alan uygulandı. Hücre kümesinin yönelimi y-z plane was changed by changing the rotation axis of the rotating magnetic field, while the uniform magnetic field of 6 mT was kept along the +x eksen.
Mikro penguen ve mikro kaplumbağanın manyetik kontrolü
Microrobots with time-symmetric motion cannot achieve a net displacement at low Reynolds number54. An efficient strategy to break time symmetry is to make the microrobot’s orientation during morphing different from its orientation during recovery. As a demonstration, we implement an orientation-switching strategy to control the micropenguin. Extended Data Fig. 6a Şekil 9'de gösterildiği gibi XNUMX saniyelik döngü süresine sahip manyetik alanların dizisini göstermektedir. 6a: 0–1 s boyunca 16 mT'lik düzgün bir manyetik alan uygulandı. x eksen (faz 1-2); 1–1.5 s, 16 mT'lik dönme manyetik alanı y eksen; 1.5–2.5 s, 2 mT'lik düzgün manyetik alan z eksen (faz 2-3); 2.5–4.5 s, 2 mT'lik dönme manyetik alanı y eksen; 4.5–5.5 s, 16 mT'lik düzgün manyetik alan x eksen (faz 3-4); 5.5–6 s, 16 mT'lik dönme manyetik alanı y eksen; 6–7 s, 2 mT'lik düzgün manyetik alan z eksen (faz 4-1); 7–9 s, 2 mT'lik dönme manyetik alanı y eksen. 9 saniyelik bir döngüden sonra mikropenguen orijinal yönelimini geri kazanır ve çizgi boyunca net bir yer değiştirme kazanır. x eksen. Genişletilmiş Veri Şek. 6b shows the magnetic field sequences with a cycle duration of 5.5 s of the micropenguin in a more efficient swimming manner. In this case, the uniform and rotation magnetic fields were mixed, enabling simultaneous micropenguin rotation and flipper opening and closing.
One disadvantage of the orientation-switching control strategy is the concomitant rotation of the whole robot, despite its universal applicability to elastic microrobots for generating a net displacement. This rotation can be avoided by using a set of picosprings driving different movable parts of microrobots with inhomogeneous magnetization, for example, the microturtle. Extended Data Fig. 7a Manyetik alanların en verimli yönlerinin araştırılmasına yardımcı olan sonlu elemanlar analizi simülasyon sonuçlarını gösterir. Nihai kontrol stratejisinin manyetik alan dizisi Genişletilmiş Veri Şekil 2'de gösterilmektedir. 7b. Farklı yüzgeçleri kontrol eden sol ve sağ çift pikoyayların koordineli harekete geçirme ve tamponlama fonksiyonları nedeniyle, mikro kaplumbağa için net bir yer değiştirme oluşturmak için yalnızca düzgün manyetik alanlara ihtiyaç vardır. Mikro kaplumbağa daha sonra yalnızca iki boyutta hareket edecek şekilde kontrol edildi. x-y plane with no rotation or displacement in the z axis: 0–1 s, 2 mT along 15° (anticlockwise direction as positive) direction from the +y yön (mikro kaplumbağanın simetrik ekseni); 1–1.5 s, −2° boyunca 75 mT +y; 1.5–2.5 s, 16 mT along −105° along +y; 2.5–3 sn, 2 mT boyunca +y. All locomotion experiments of the microrobots were performed in PBS at 25 °C. The microturtle contains double concentration of MNPs was controlled with a cycling period of 0.8 s (Extended Data Fig. 8) with comparable phase sections of 0–0.25 s, 0.25–0.4 s, 0.4–0.7 s and 0.7–0.8 s.
Biocompatibility evaluation
HeLa cells were used to assess the biocompatibility of the micromachines, specifically the microgripper arrays. In brief, 7 samples of fabricated microgripper arrays were placed in the cell culture wells of 6-well plates and filled with 3 ml of culture media. The control group wells were filled with only cell media. Each well was seeded with approximately 105 HeLa hücreleri. 48 saatlik inkübasyonun ardından mikro yakalayıcı gruptan 1 kuyucuk ve kontrol grubundan 1 kuyucuk, floresan diasetat (5 mg ml-XNUMX) içeren canlı/ölü boyama kiti kullanılarak doğrudan boyandı.-1 in acetone) and propidium iodide (1 mg ml-1 in PBS). Multi-channel fluorescence images were taken using fluorescence microscopy (Cell Observer, Carl Zeiss Microscopy) under excitation at a wavelength of 470 nm for live cells (emission wavelength 530 nm) and 540 nm for dead cells (emission wavelength 618 nm). After 72 h incubation, the remaining 12 wells of cells were trypsinized, stained and counted under the fluorescence microscope. Cell viability was calculated as the ratio of the number of live cells (green) to the total cell count.
İstatistikler ve tekrarlanabilirlik
No statistical method was used to predetermine the sample size. No data were excluded from the analyses. Cells and fabricated samples were randomly assigned to the respective groups before operation. The investigators were not blinded to allocation during experiments and outcome assessment.
Raporlama özeti
Araştırma tasarımı hakkında daha fazla bilgi Doğa Portföyü Raporlama Özeti bu makaleye bağlantılı.
- SEO Destekli İçerik ve Halkla İlişkiler Dağıtımı. Bugün Gücünüzü Artırın.
- PlatoData.Network Dikey Üretken Yapay Zeka. Kendine güç ver. Buradan Erişin.
- PlatoAiStream. Web3 Zekası. Bilgi Genişletildi. Buradan Erişin.
- PlatoESG. karbon, temiz teknoloji, Enerji, Çevre, Güneş, Atık Yönetimi. Buradan Erişin.
- PlatoSağlık. Biyoteknoloji ve Klinik Araştırmalar Zekası. Buradan Erişin.
- Kaynak: https://www.nature.com/articles/s41565-023-01567-0
- :dır-dir
- :olumsuzluk
- $UP
- 1
- 10
- 100
- 12
- %15
- 16
- 20
- 200
- 2010
- 2019
- 2020
- 22
- 23
- 24
- 25
- 28
- 30
- %35
- 3d
- 40
- 49
- 51
- 54
- 7
- 70
- 72
- 8
- 80
- 9
- 98
- a
- Hakkımızda
- yukarıdaki
- Göre
- doğruluk
- Başarmak
- edinilen
- Action
- katma
- Ek
- Düzeltilmiş
- ters
- Sonra
- tekrar
- AL
- hizalamak
- hizalı
- dizme
- Türkiye
- tahsis
- boyunca
- her zaman
- am
- an
- analizleri
- analiz
- analiz
- Çapa
- ve
- Başka
- herhangi
- uygulamalı
- Uygulanması
- yaklaşık olarak
- ARE
- ALAN
- etrafında
- Dizi
- göre
- AS
- belirlemek
- değerlendirme
- atanmış
- At
- iliştirmek
- mevcut
- önlemek
- kaçınılması
- EKSENLER
- eksen
- dengeli
- bar
- merkezli
- BE
- oldu
- önce
- arasında
- darbe
- organları
- mola
- kısaca
- by
- hesaplanmış
- CAN
- yapamam
- ele geçirmek
- Yakalanan
- Carl
- dava
- hücre
- Hücreler
- belli
- Bölme
- değişiklik
- değişmiş
- değiştirme
- özelliği
- kimyasallar
- klasik
- tıklayın
- kapanış
- Küme
- kod
- toplanmış
- ticari
- karşılaştırılabilir
- karmaşık
- bileşen
- bileşenler
- konsantrasyon
- zoraki
- içeren
- devamlı olarak
- kontrast
- kontrol
- kontrollü
- kontrol
- koordinat
- koordine
- düzeltilmiş
- olabilir
- sayılır
- KOVALENT
- kritik
- Kültür
- eğri
- devir
- veri
- ölü
- tanımlamak
- derece
- Talep
- yoğunluk
- Dizayn
- tasarım
- Rağmen
- ayrıntılar
- Bulma
- kararlı
- gelişmiş
- gelişme
- cihaz
- farklı
- boyutlar
- direkt
- yön
- direkt olarak
- dezavantaj
- dağınık, dağılmış
- deplasman
- yapılmış
- çift
- sürme
- düştü
- kurutma makinesi
- süre
- sırasında
- e
- E&T
- her
- kolay
- ed
- verimli
- verimli biçimde
- eleman
- emisyon
- etkinleştirme
- artırmak
- çevre
- enzimatik
- Eter (ETH)
- örnek
- Dışında
- hariç
- deneme
- deneysel
- deneyler
- Maruz kalma
- genişletilmiş
- dış
- Fe
- alan
- Alanlar
- Incir
- şekil
- dolu
- son
- Nihayet
- Ad
- uydurma
- sıvı
- AKI
- takip etme
- İçin
- Zorla
- Güçler
- oluşturulan
- bulundu
- itibaren
- tamamen
- işlev
- fonksiyonlar
- daha fazla
- Ayrıca
- Kazançlar
- oluşturmak
- oluşturulan
- üreten
- geometri
- verilmiş
- Verilmesi
- bardak
- kademeli olarak
- Yeşil
- grup
- Grubun
- rehberlik
- güdümlü
- vardı
- Yarım
- ele
- yardım et
- tutacak
- HTTPS
- IEEE
- görüntüleri
- darbe
- uygulamak
- uygulanan
- in
- Kuluçka
- belirtilen
- Gösterge
- etkilemek
- bilgi
- ilk
- içeride
- entegre
- girişim
- içine
- Müfettişler
- ONUN
- tuttu
- malzeme
- lazer
- katmanları
- sol
- uzunluk
- hayat
- ışık
- hatları
- LINK
- bağlantılı
- yaşamak
- yük
- yükler
- yerel
- Düşük
- Manyetik alan
- yapmak
- manipulasyon
- hile
- tavır
- işaretlenmiş
- malzeme
- malzemeler
- ölçmek
- ölçülü
- ölçüm
- ölçümler
- mekanik
- mekanik
- medya
- orta
- metal
- yöntem
- mikro
- Mikroskop
- mikroskopla inceleme
- dk
- karışık
- Karıştırma
- karışım
- ML
- model
- Modelleme
- değiştirilmiş
- modül
- Daha
- daha verimli
- çoğu
- hareket
- hareket
- hareketli
- MT
- çoklu
- Nanoteknoloji
- Tabiat
- gerekli
- net
- yok hayır
- özellikle
- numara
- gözlenen
- elde etmek
- elde
- of
- on
- Teknede
- bir Zamanlar
- bir tek
- üstüne
- açık
- açma
- ameliyat
- operasyon
- Operasyon
- optik
- or
- Origin
- orijinal
- Diğer
- aksi takdirde
- dışarı
- Sonuç
- çiftleri
- Paralel
- parametreler
- parçalar
- PBS
- yapılan
- dönem
- faz
- fazlar
- Zift
- yerleştirilir
- düzlem
- Düzlemler
- Platon
- Plato Veri Zekası
- PlatoVeri
- Nokta
- portföy
- pozisyon
- pozisyonları
- pozitif
- mümkün
- güç kelimesini seçerim
- güçler
- tahmin
- hazırlanmış
- varlık
- sundu
- Önceden
- süreç
- profesyonel
- Projeksiyon
- özellikleri
- özellik
- itme
- satın alındı
- Kuantum
- oran
- oran
- kayıt
- kurtarır
- kurtarma
- Kırmızı
- referans
- kabul
- serbest
- kalan
- uzaktan
- Kaldır
- tekrarlanan
- yerine
- Bildirilen
- Raporlama
- temsil etmek
- araştırma
- saygı
- bu
- Sonuçlar
- krallar gibi yaşamaya
- sert
- robot
- Rulo
- rolling
- oda
- s
- aynı
- SCI
- İkinci
- bölümler
- görmek
- ayrıntılara bakınız
- Aramak
- bölüm
- sensörler
- Dizi
- Serum
- set
- Shape
- şekiller
- kısa
- meli
- gösterilen
- Gösteriler
- basitleştirilmiş
- basitleştirilmesi
- sadece
- simülasyon
- simülasyonları
- eşzamanlı
- beden
- Yavaş yavaş
- küçük
- So
- sodyum
- Yumuşak
- Yazılım
- çözüm
- özel
- özel
- özellikle
- Belirtilen
- Spektrum
- hız
- sperm
- istatistiksel
- Stratejileri
- yapısal
- yapı
- Daha sonra
- duyarlılık
- yüzme
- sistem
- alınan
- Hedef
- terminal
- metin
- o
- The
- sonra
- Bunlar
- Teta
- Re-Tweet
- üç
- kene
- zaman
- zamanlar
- için
- Toplam
- karşı
- Yörünge
- trans
- taşıma
- yakalama
- tedavi
- Iki kere
- iki
- Ultrasonik
- altında
- Evrensel
- kullanım
- Kullanılmış
- kullanma
- valide
- yaşayabilirlik
- Videolar
- hacim
- oldu
- yıkama
- Su
- Yol..
- we
- İYİ
- Wells
- vardı
- ne zaman
- hangi
- süre
- bütün
- ile
- olmadan
- yazı yazıyor
- zefirnet
- sıfır