Следующий значительный автомобильный блог из серии, который я опубликую (см. здесь для предыдущего блога).
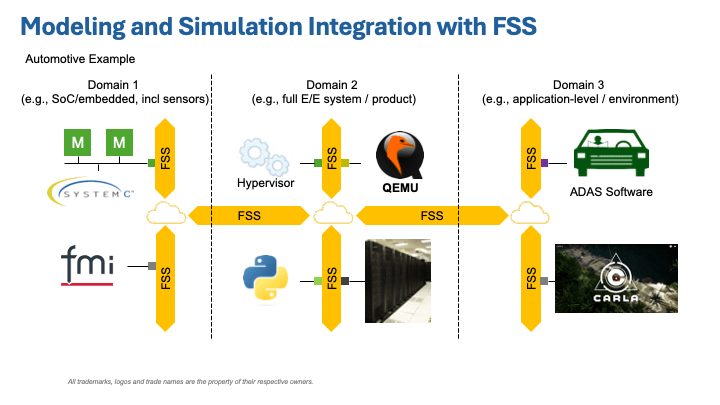
В мире полупроводников смешанное моделирование означает сочетание логического моделирования, моделирования схемы, виртуального моделирования (для программного обеспечения, работающего на аппаратном обеспечении, которое мы проектируем), а также эмуляции и прототипирования FPGA. Хотя этот диапазон может показаться всеобъемлющим, на самом деле это все еще провинциальный взгляд. OEM-производители, такие как автомобильные компании, разрабатывают комплексные продукты, в которых программное обеспечение играет огромную роль, управляя, по сути, высокораспределенной вычислительной системой по всему автомобилю. Разработка и тестирование этого программного обеспечения на (программных) цифровых двойниках позволяет проводить более быстрые эксперименты и обеспечивать более высокий уровень параллелизма, чем это возможно с аппаратными прототипами, но требует сотрудничества между многими видами симуляторов, специфичных для конкретной предметной области. Очень разнообразная группа компаний планирует создать рабочую группу в рамках Accellera, чтобы определить стандарт, отвечающий потребностям «федеративного моделирования».
Кому нужно интегрированное моделирование и почему?
На DVCon я встретился с впечатляющей группой: Марк Бертон (заместитель председателя предложенной рабочей группы, также Qualcomm), Юрий Байда (главный инженер-программист в Ford Motor Company, ранее Intel), Тревор Виман (технолог моделирования системного уровня в Ford Motor). Company, ранее также Intel), Лу Дай (председатель Accellera и Qualcomm) и Деннис Брофи (не нуждается в представлении). Далее следует, прежде всего, краткий обзор материалов Марка, Юрия и Тревора.
Автомобиль — это сеть взаимосвязанных компьютеров, разработанная несколькими поставщиками; команда разработчиков программного обеспечения OEM должна разрабатывать/совершенствовать и отлаживать программное обеспечение, чтобы вся эта система работала правильно. Возможно, информационно-развлекательная система основана на чипе Qualcomm, взаимодействующем с зональными контроллерами, которые, в свою очередь, взаимодействуют с краевыми датчиками, микроконтроллерами трансмиссии и другими устройствами вокруг автомобиля, и все они обмениваются данными через CAN или автомобильный Ethernet. Чтобы обеспечить приемлемое время моделирования программного обеспечения, эта общая модель системы должна работать на абстрактных виртуальных моделях для каждого компонента. Поставщики предоставляют такие модели в различных форматах: собственные симуляторы набора команд или представления, основанные на различных инструментах виртуального моделирования.
Это поднимает вечную проблему объединения всех этих различных моделей в единую виртуальную среду выполнения. Возможно, когда-нибудь все поставщики будут предоставлять модели с TLM-совместимыми интерфейсами, но до тех пор можем ли мы построить более эффективные мосты/оболочки для сопряжения между всеми этими моделями? Именно на это направлена инициатива Federated Simulation. Юрий привел убедительный пример того, почему нам нужно заставить это работать. Обновления программного обеспечения по беспроводной сети (OTA) являются обязательными для программно-конфигурируемых автомобилей, но что произойдет, если что-то пойдет не так в обновлении – если обновление сломает ваш автомобиль или какую-то его часть? Подобные сценарии на уровне системы необходимо учитывать во время проектирования, чтобы смягчить такие проблемы, и их необходимо тщательно протестировать.
В конечном счете, разработка системного программного обеспечения должна начинаться заблаговременно, до того, как станет доступно оборудование, и полностью зависит от надежных абстракций высокоуровневого моделирования, лежащих в основе общего моделирования системы.
Не только для электронных систем
Автомобиль – это не просто электронные схемы; ни самолет, ни космический корабль, ни промышленный робот. Тем не менее, электроника играет все большую роль, взаимодействуя теперь с механическими системами и окружающей средой. Антиблокировочная система тормозов должна вести себя соответствующим образом при различных уровнях сцепления на сухой дороге, в дождь или в снег. От ADAS до автономности — системы вождения необходимо тестировать в широком спектре сценариев. Симулятор КАРЛА является важным компонентом такого тестирования, моделирующего городские и другие планировки во многих условиях окружающей среды и предоставляющего потоковое видео, лидар и другие данные датчиков в качестве входных данных для полного моделирования системы.
Решение для интегрированного моделирования должно быть связано с такими симуляторами, как CARLA. В конечном итоге он также должен сочетаться со стандартами в других отраслях, таких как OpenCRG для описания дорожных покрытий, VISTAS/VHTNG для авионики, SMP2 для космических приложений и FMU для мехатроники. Каждый из них прочно обосновался в своей области и вряд ли будет вытеснен. Стандарт федеративного моделирования должен уважать эти стандарты и плавно взаимодействовать с ними – я предполагаю, что поэтапно. Тем не менее, участие в этих усилиях уже пользуется энтузиазмом со стороны многих сторон.
| Акселлера
Агнисис, ООО |
Intel Corporation
IRT-Сент-Экзюпери Robert Bosch GmbH |
Спейсбел STMicroelectronics Synopsys Shanghai UniVista Industrial Software GroupTexas Instruments Лаборатории Ваявья Зеттаскейл |
Членство в основной команде для первоначального определения
Что потребуется?
Это амбициозная цель, но стоит отметить, что Министерство обороны США в 1990-х годах запустило аналогичную программу под названием HLA, которая продолжает расширяться. Airbus построил собственную архитектуру с аналогичными целями, включая физический прототип самолета для циклических испытаний оборудования. На уровне электронных систем Марк, Юрий и Тревор ранее участвовали в проектах мультисимуляторов в Intel и Qualcomm, а в последнее время — в Ford (Юрий и Тревор). Они не считают это недостижимой целью, хотя я предполагаю, что она, скорее всего, будет развиваться от скромных ожиданий через несколько выпусков.
Основная концепция, описанная мне, основана на развертывании в облаке с экземпляром контейнера для каждой симуляции и Kubernetes для распределения ресурсов (ЦП, графические процессоры, аппаратные ускорители и т. д.) и оркестрации. Команда Accellera не планирует заново изобретать какие-либо стандарты (или новые стандарты), которые уже хорошо работают. Вместо этого они намерены использовать существующие транспортные уровни, добавляя только уровни приложений выше этого уровня, чтобы экземпляр симулятора мог публиковать потоки активности для других подписывающихся симуляторов, а подписчики могли выбирать, какие данные они хотят видеть.
Очень интересно. Вы можете узнать больше ВОТ и ВОТ
Читайте также:
Обновление функциональной безопасности Accellera
DVCon Europe скоро появится. Войти Сейчас
Пересечение доменов Accellera и Clock на #60DAC
Поделитесь этим постом через:
- SEO-контент и PR-распределение. Получите усиление сегодня.
- PlatoData.Network Вертикальный генеративный ИИ. Расширьте возможности себя. Доступ здесь.
- ПлатонАйСтрим. Интеллект Web3. Расширение знаний. Доступ здесь.
- ПлатонЭСГ. Углерод, чистые технологии, Энергия, Окружающая среда, Солнечная, Управление отходами. Доступ здесь.
- ПлатонЗдоровье. Биотехнологии и клинические исследования. Доступ здесь.
- Источник: https://semiwiki.com/artificial-intelligence/343095-simulating-the-whole-car-with-multi-domain-simulation/
- :имеет
- :является
- :нет
- $UP
- 5
- 6
- 8
- 9
- a
- О нас
- выше
- рассеянный
- ускорители
- приемлемый
- через
- деятельность
- АДА
- добавить
- адрес
- против
- Цель
- AIR
- аэробус
- самолет
- Все
- распределение
- позволяет
- вдоль
- уже
- причислены
- честолюбивый
- an
- и
- любой
- Приложения
- надлежащим образом
- архитектура
- МЫ
- около
- массив
- AS
- At
- автоматический
- автомобильный
- Автономия
- доступен
- основанный
- BE
- было
- до
- вести себя
- Лучшая
- между
- смешивание
- Блог
- Bosch
- строить
- построенный
- но
- by
- под названием
- CAN
- автомобиль
- Кресла
- чип
- схема
- схемы
- Часы
- облако
- сотрудничество
- приход
- Скоро
- общение
- Компании
- Компания
- неотразимый
- полный
- полностью
- компонент
- Вычисление
- компьютеры
- сама концепция
- Условия
- считается
- Container
- продолжающийся
- Основные
- Тело
- КОРПОРАЦИЯ
- правильно
- Пара
- переход
- DAI
- данным
- определять
- зависимый
- развертывание
- описывать
- описано
- Проект
- системы проектирования
- проектирование
- развивать
- развитый
- развивающийся
- Развитие
- Устройства
- различный
- Интернет
- Цифровые близнецы
- перемещенный
- распределенный
- Разное
- do
- МО
- домен
- Dont
- вождение
- сухим
- в течение
- каждый
- Рано
- Edge
- эффект
- усилие
- Электронный
- Electronics
- появление
- позволяет
- инженер
- энтузиазмом
- Окружающая среда
- установленный
- и т.д
- Европе
- развивается
- пример
- существующий
- ожидания
- факт
- быстрее
- федеративный
- следующим образом
- Что касается
- Ford
- Ford Motor Company
- Форматы
- FPGA
- от
- полный
- функциональная
- цель
- идет
- руководящий
- Графические процессоры
- группы
- Расти
- догадывающийся
- происходит
- Аппаратные средства
- Есть
- High
- на высшем уровне
- очень
- HTTPS
- i
- if
- важную
- что она
- впечатляющий
- in
- В других
- В том числе
- повышение
- дополнительный
- промышленность
- начальный
- Инициатива
- вход
- затраты
- пример
- вместо
- Intel
- намереваться
- намерение
- взаимодействующий
- взаимосвязано
- интересный
- интерфейсы
- Мультиязычность
- взаимодействовать
- в
- Введение
- вовлеченный
- IT
- ЕГО
- всего
- виды
- Kubernetes
- запуск
- запустили
- слоев
- УЧИТЬСЯ
- уровень
- уровни
- Кредитное плечо
- li
- дело
- такое как
- Вероятно
- логика
- ООО
- сделать
- многих
- отметка
- макс-ширина
- Май..
- может быть
- me
- означает
- механический
- Встречайте
- членство
- встретивший
- смягчать
- смешанный
- Смешивание
- модель
- моделирование
- Модели
- скромный
- БОЛЕЕ
- Мотор
- с разными
- должен
- Должен иметь
- Необходимость
- потребности
- ни
- сеть
- нет
- отметив,
- сейчас
- of
- on
- только
- or
- оркестровка
- Другое
- за
- собственный
- часть
- возможно
- физический
- план
- самолет
- планирование
- Платон
- Платон Интеллектуальные данные
- ПлатонДанные
- играет
- возможное
- После
- предыдущий
- предварительно
- в первую очередь
- Основной
- Проблема
- проблемам
- Продукция
- проектов
- предложило
- ( изучите наши патенты),
- прототип
- Прототипы
- макетирования
- обеспечивать
- при условии
- обеспечение
- провинциальный
- публиковать
- Qualcomm
- RAIN
- повышения
- Читать
- недавно
- изобрести
- публикации
- складская
- представления
- требуется
- ресурс
- уважение
- Дорога
- робот
- Роли
- Run
- Бег
- время выполнения
- Сохранность
- Сказал
- Сценарии
- посмотреть
- казаться
- селективный
- полупроводник
- датчик
- служить
- набор
- подпись
- значительный
- SIM
- аналогичный
- моделирование
- моделирование
- имитатор
- плавно
- снег
- Software
- разработка программного обеспечения
- Инженер-программист
- Решение
- некоторые
- когда-нибудь
- удалось
- Скоро
- Space
- космический корабль
- пролет
- конкретный
- стандарт
- стандартов
- Начало
- Шаги
- По-прежнему
- потоковый
- потоки
- строка
- Абоненты
- такие
- поставщики
- поддержка
- окружающих
- Швеция
- конспект
- система
- системы
- взять
- говорить
- команда
- технологии
- технолог
- проверенный
- Тестирование
- чем
- который
- Ассоциация
- их
- тогда
- Там.
- Эти
- они
- этой
- хоть?
- Через
- раз
- в
- инструменты
- Всего
- тяга
- перевозки
- Тревор
- ОЧЕРЕДЬ
- Близнецы
- В конечном счете
- под
- подкреплять
- унифицированный
- вряд ли
- до
- Обновление ПО
- Updates
- городской
- us
- разнообразие
- Огромная
- Транспорт
- вертикалей
- очень
- очень разнообразный
- с помощью
- Видео
- Вид
- Виртуальный
- хотеть
- хочет
- we
- ЧТО Ж
- Что
- , которые
- в то время как
- все
- зачем
- будете
- Работа
- работает
- Рабочая группа
- Мир
- стоимость
- Неправильно
- являетесь
- ВАШЕ
- зефирнет